
人工智能
最新课程
- 高压 MOSFET/IGBT 栅极驱动原理与设计 (下)
- 高压 MOSFET/IGBT 栅极驱动原理与设计 (上)
- C2000™ Σ-Δ 滤波器调制器 (SDFM)
- C2000™ 的传感和处理功能
- C2000™ 可配置逻辑块 (CLB)
- C2000™ 模数转换器 (ADC) 培训
- C2000™ 增强型脉宽调制器 (ePWM)
- Code Composer Studio™ 快速提示
- 用于优化电源性能的 PCB 布局指南
- 线性稳压器的提示、技巧和高级应用
热门课程
TI-RSLK 模块 2 - 讲座视频 – 电压、电流和功率

大家好,
我是
在该模块中,我们将
和功率。
我们将了解一下
电感和
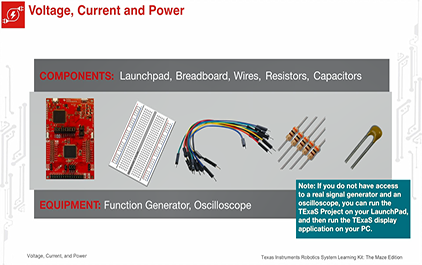
在实验中,您将
测试仪器,例如
和示波器。
好的,让我们开始吧。
好,让我们
因为它是其中
电流是因电子的
因此,如果带单位负电荷的
从此处向右移动,
我们可以将此电子运动
定义为电流。
请注意,由于电流
是负的,因此
电子实际上将产生
现在,我们将
安培的定义
在导线中移动
这会非常有趣,
运动将对
产生影响。
如果我们查看
我们会看到它
那么,如果我们
电阻,那么
电流在导线上,
沿着该方向流动。
它产生的影响
因此,如果您
您可以刺激您的
不过,在本次
要做的是,
驱动机器人中的,
因此,电流的流动将产生该动作。
欧姆定律可以将某个
流过该电阻器的
该电流与此设备的
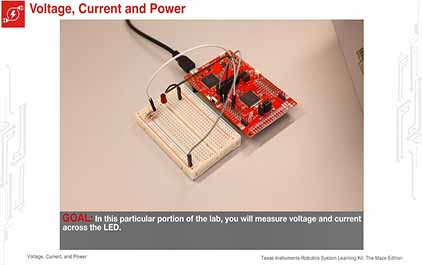
如果您想
假设我们在这里
另一个电阻器
我想测量该电流,
实际上是,断开
我将断开它。
这些通常已经
而我将拆开我的
电流表连接进电路。
我要将我的电流表上的
将另一个端子
然后将其连接到我的电流表,
再说一次,它具有方向性,
导线流动。
另一方面,电压,
电压,因为每天
但从技术角度而言,
发生的电势。
那么,具体而言,
我们将采用
就在这里。
电压的单位是伏特,
它具有产生
因此,我们要将它
如果我们的部署
该机器人将
因此,电势差导致
再说一次,欧姆
某个电阻上的
该电阻器的电流
现在,对于您的
如果我输出低电平,
如果我输出高电平,
那么,我们将看到那里的电压。
再说一次,它始终作为
我们可以对电压
我们通常采用一个点
它始终具有
将采用我们的
在本例中是
然后将其定义为接地。
当我想测量
通常会成为参考点。
因此,我要将我的
就像电流表一样,
我将采用电压表的
连接到我的
现在,我将采用
将其连接到我的
从而能够测量
一个非常
电压表的设备
它具有相同的
将示波器的接地
接地端,然后
连接到机器人
示波器所做的是
函数的电压。
具体而言,
示波器探针
那么我将
我们将在整个课程中
但它将是随时间
其中电机上的
和
这是我们的
总之,电压能够提供能量。
我们将使用电压表
它始终具有方向性,
就像电流一样。
如果我们有
那么我们可以通过这个
和电流关联在一起。
现在,让我们
“Energy”(能量)一词与“English”一词看起来相似。
我们知道,我们通过吃食物
我们向汽车中加注汽油
我们要将能量
镍氢电池中。
我们将对电池
在本质上就是将能量
再说一次,它是一节
该能量现在
在这里,能量的
乘以电流
该电压下生成
例如,如果我的机器人
它将使用
假设它使用
墙的速度转动
它沿着赛道行驶一圈
我们可以将电压
这样可以得出它将
焦耳是能量的单位。
焦耳是伏安秒
才能沿着赛道
我们可以执行
通常,电池的规格不是以焦耳
我们要将这
因此,我们将
定义为电流
该电流的时长。
这是因为电池
恒定的电压。
那么,具体而言,让我们
我们的
现在,它全速运行
任何特殊的低功耗
5
一节碱性电池,一节
储电量为
请注意,它的电压
为了驱动
我要使用两节
将其以串联方式
因此您此时具有
负,正,负
电池都是有极性的
如果我连接到一个
这是我的接地端
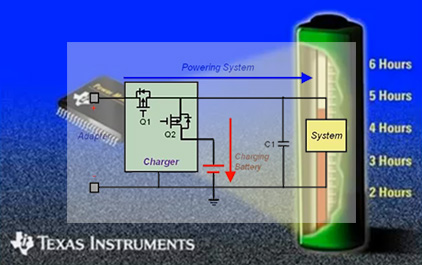
现在,我感兴趣的
可以持续多长时间?
那么,我可以使用我的功率预算。
如果我希望知道这个
功率预算可以
我可以使用
具体而言,
是
5
我可以看到,这将持续
功率是能量的
因此它是
它的单位是瓦,
焦耳数,它还会
术语中,
电流乘以电压。
因此,我们可以查看
如果我们的机器人实际上
我们可以在这里看到它
因此,这意味着,当它
或者,我们使用
本节课中功率的
这样一个事实,即我们
那么,如果我们使用
然后我们以瓦
那么我们将获得
如果我们使用
我们将在几张
我们将
来转化成光能。
如果我们
我们将输入电能
然后我们将获得
热量形式的能量浪费,
导致机器人移动。
因此,我将看到
系统中的该能量转换,
转换为另一种能量。
好的,您将在整个
让我们看看具体的设备。
我们已经讨论了
V
与该电阻中的
线性关系。
因此,如果我施加
到该电阻上,
是
看到,根据欧姆
2
廉价电阻的
当我去买一个
其取出来时,
它可能是介于
这是没有问题的。
这是一个误差在正负
我们讨论了
那么,我们说过,任何
中的功率是
那么,在这里的
此案例中的
乘以
这将是热功率,
热量或温度
但是,电阻具有
它指定了为了避免
最大功率。
它
可能消耗
您可以看到,我
施加的
因此不会有问题。
我们将在整个
具体而言,我们
和控制电流,
以正确的方式工作。
那么,再说一次,
在尝试应用欧姆定律
为了理解欧姆定律,
让我们做两个类比。
好的,那么让我画一下
正如您知道的,
流过某个
电流等于施加在
即电势除以一个常量,
那么,电阻中的
导致电流流动的
我们要将电压
得到电流。
那么,让我们看看两种情形。
我使用一个水箱,
我将它注满水。
然后我放入一根
然后我在底部
现在,这是流体动力学。
事实是,水的
旋塞,从而
该压力是导致
那么,该情形
其单位是毫升/秒。
压力是在它上面
但该旋塞中
因此,如果我关闭该旋塞,
如果我打开该旋塞,
进行流动。
液体的流量
除以该旋塞
这与欧姆定律中的
让我们再做一个类比。
这是处于夏季的
外面有
大楼内非常
温度是
该固体,
窗户上存在的
产生热流。
因此,温度差
流动的潜在原因。
如果我想确切地知道
我可以使用
我需要弄清楚该
即热阻,
将流过
热流的瓦数。
那么,在这里的
看到潜能和影响之间的
这是阻力。
好的,让我们做一个更加
我们将使用这些
电路中的噪声。
那么,为了构建
我们将采用一个金属板
尽管它是一个非常
一个非常大的面积。
我们要将一根铜
我们将采用第二个
然后我们将
这两个板通过
这是一个绝缘体。
电介质是
之间的绝缘材料。
然后施加稳态的直流电。
那么我在电容器上
将要发生的是,
那么,正电荷将
该电极上。
您在这里有
负电荷将
因此,正电荷
负电荷将
在直流电下没有电流流动。
那么,它是一个可以
但它不会这么无聊。
如果我施加交流电,
我知道频率,F
嗯,1/F
如果我知道
那么电流将流动。
电压与电流
是阻抗的函数。
现在,如果您
您知道
是负
您可以查看
与电流之间的关系,
是该波形的频率,
以法拉为单位。
现在,如果您
那么您可以使用
来感受此处
其中我们采用
即它有多大,
以及电流的幅度。
然后,对于电压
之比,通过使用
微积分,我们
简单得多的关系。
这之所以
是因为我们将
由于可以
因此电容
用于提高我们的
好的,这些是电容器。
当我们构建电机时,
电感器是什么,
它是使用这里的
由于电机的
电感器将存在、
再说一次,它是无源器件。
当我们绘制电路时,
我们将其称为L,它的单位是亨利。
它与电容器
也就是说,在直流电下,由于
换话句话说,它
但在交流电下,它将具有阻碍作用。
它将阻碍
我们可以做与
我们可以查看
与电流之比,
平方根,
其中
感值,以安为单位。
可以这么说,一旦
电感就会开始起作用。
随着我们继续学习,
这些电感。
我们将在两个位置
我们的线传感器。
在您的机器人的
线传感器,
您是否位于
它的内部将有一个
另一个位置是在
您的
您将使这些灯闪烁,
正在发生的情况。
在实验
因此,在本节课中,我们
它是一个半导体设备。
它不是电阻。
因此,每当您尝试这么
您无法对
它们是高度非线性的。
它们仅沿一个方向导电。
我喜欢把它
我可以看到,
它无法通过
例如,如果我尝试对它
我不会得到任何电流。
负
一直到
对于该特定的
产生任何电流,
将产生
您应该记得,
电压乘以电流。
在本例中,1.8
是功率大小,
将转换为
导致这个灯点亮。
关于
这意味着它变化得很快。
因此,如果您尝试将
它将爆炸,
因此,我们将在
用作机器的输出。
它们还用于
那么,再说一次,LED
研究的组件。
现在,我不想
因为我们使用整个
但可以这么说,如果
我们将看到我们
看到的三样东西。
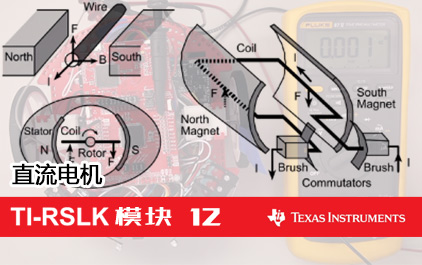
这里存在的导线
或者在电机的
导线采用线圈
将导致电感。
它是一个电机的
可以在这里获取
转换为机械功率。
但该运行的有趣
两个方面。
那么,摩擦等因素
实际上会以不利的
系统上生成
那么,EMF
它是在电功率
之间实现
元素。
总之,我们
您应该记得欧姆定律。
我们讨论了电压、
我们讨论了电容
相当于开路。
它们将在交流电下
我们使用它来
电路中的噪声。
电感恰好相反。
它们在直流电下相当于短路,
它们构建
LED
具有指数关系。
我们将查看
功率感兴趣,
电压乘以电流。
这将告诉我们
好的,那么这是
工程术语的
在整个课程中
祝您本次实验愉快,
希望您了解
如何使用
如何使用示波器。
好的,下次再见。
-
 未学习 TI-RSLK 模块 1 - 讲座视频 – 使用 CCS 在 LaunchPad 上运行代码
未学习 TI-RSLK 模块 1 - 讲座视频 – 使用 CCS 在 LaunchPad 上运行代码
-
 未学习 TI-RSLK 模块 1 - 实验视频 1.1 – 安装 tirslk_maze
未学习 TI-RSLK 模块 1 - 实验视频 1.1 – 安装 tirslk_maze
-
 未学习 TI-RSLK 模块 1 - 实验视频 1.2 – 安装 CCS 和调试
未学习 TI-RSLK 模块 1 - 实验视频 1.2 – 安装 CCS 和调试
-
 未学习 TI-RSLK 模块 1 - 实验视频 1.3 – 运行 TExaS 逻辑分析仪
未学习 TI-RSLK 模块 1 - 实验视频 1.3 – 运行 TExaS 逻辑分析仪
-
 未学习 TI-RSLK 模块 1 - 实验视频 1.4 – 运行 TExaS 示波器
未学习 TI-RSLK 模块 1 - 实验视频 1.4 – 运行 TExaS 示波器
-
 未学习 TI-RSLK 模块 2 - 讲座视频 – 电压、电流和功率
未学习 TI-RSLK 模块 2 - 讲座视频 – 电压、电流和功率
-
 未学习 TI-RSLK 模块 2 - 实验视频 2.1 – 测量电容器的阻抗
未学习 TI-RSLK 模块 2 - 实验视频 2.1 – 测量电容器的阻抗
-
 未学习 TI-RSLK 模块 2 - 实验视频 2.2 – LED (I,V) 响应曲线、指数关系
未学习 TI-RSLK 模块 2 - 实验视频 2.2 – LED (I,V) 响应曲线、指数关系
-
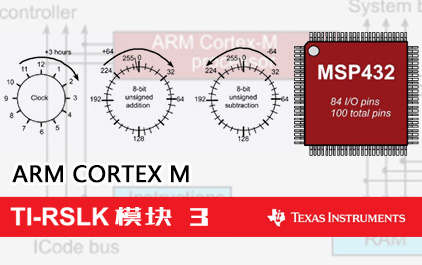 未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 架构
未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 架构
-
 未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 组件
未学习 TI-RSLK 模块 3 - 讲座视频 - ARM Cortex M 组件
-
 未学习 TI-RSLK 模块 3 - 实验视频 3.1 - 调试解决方案、可视化、断点和单步执行
未学习 TI-RSLK 模块 3 - 实验视频 3.1 - 调试解决方案、可视化、断点和单步执行
-
 未学习 TI-RSLK 模块 4 - 讲座视频 - C 语言编程
未学习 TI-RSLK 模块 4 - 讲座视频 - C 语言编程
-
 未学习 TI-RSLK 模块 4 - 讲座视频 - 设计
未学习 TI-RSLK 模块 4 - 讲座视频 - 设计
-
 未学习 TI-RSLK 模块 4 - 讲座视频 - 调试
未学习 TI-RSLK 模块 4 - 讲座视频 - 调试
-
 未学习 TI-RSLK 模块 4 - 实验视频 4.1 - 调试解决方案、可视化、变量、单步执行
未学习 TI-RSLK 模块 4 - 实验视频 4.1 - 调试解决方案、可视化、变量、单步执行
-
 未学习 TI-RSLK 模块 4 - 实验视频 4.2 - 调试解决方案、可视化、断点、单步执行
未学习 TI-RSLK 模块 4 - 实验视频 4.2 - 调试解决方案、可视化、断点、单步执行
-
 未学习 TI-RSLK 模块 5 - 讲座视频 - 电池和电压
未学习 TI-RSLK 模块 5 - 讲座视频 - 电池和电压
-
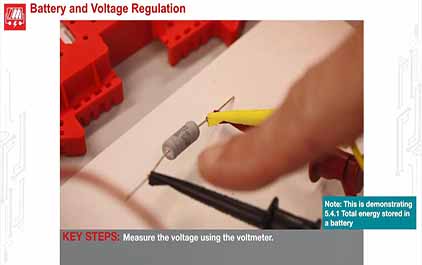 未学习 TI-RSLK 模块 5 - 实验视频 5.1 - 测量电池的电压和电流
未学习 TI-RSLK 模块 5 - 实验视频 5.1 - 测量电池的电压和电流
-
 未学习 TI-RSLK 模块 5 - 实验视频 5.2 - 连接电机驱动器和配电板
未学习 TI-RSLK 模块 5 - 实验视频 5.2 - 连接电机驱动器和配电板
-
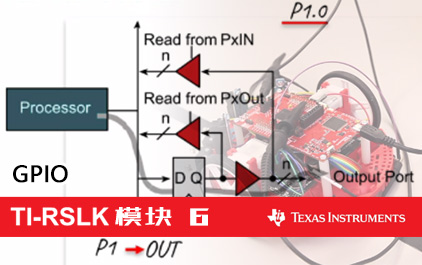 未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO MSP432
未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO MSP432
-
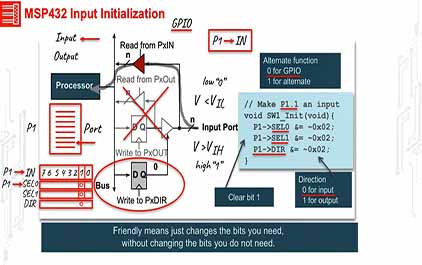 未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO 编程
未学习 TI-RSLK 模块 6 - 讲座视频 - GPIO 编程
-
 未学习 TI-RSLK 模块 6 - 实验视频 6.1 - 演示反射传感器的工作原理
未学习 TI-RSLK 模块 6 - 实验视频 6.1 - 演示反射传感器的工作原理
-
 未学习 TI-RSLK 模块 6 - 实验视频 6.2 - 演示实验解决方案 - 测试线路传感器
未学习 TI-RSLK 模块 6 - 实验视频 6.2 - 演示实验解决方案 - 测试线路传感器
-
 未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机理论
未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机理论
-
 未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机线路跟踪器
未学习 TI-RSLK 模块 7 - 讲座视频 - 有限状态机线路跟踪器
-
 未学习 TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
未学习 TI-RSLK 模块 7 - 实验视频 7.1 - 运行 FSM 启动代码
-
 未学习 TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM
未学习 TI-RSLK 模块 7 - 实验视频 7.2 - 运行解决方案代码 - 设计更好的 FSM
-
 未学习 TI-RSLK 模块 8 - 讲座视频第一部分 - 开关
未学习 TI-RSLK 模块 8 - 讲座视频第一部分 - 开关
-
 未学习 TI-RSLK 模块 8 - 讲座视频第二部分 - 连接输入和输出 - LED
未学习 TI-RSLK 模块 8 - 讲座视频第二部分 - 连接输入和输出 - LED
-
 未学习 TI-RSLK 模块 8 - 实验视频 8.1 - 连接开关和 LED 以及调试
未学习 TI-RSLK 模块 8 - 实验视频 8.1 - 连接开关和 LED 以及调试
-
 未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - 理论
未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - 理论
-
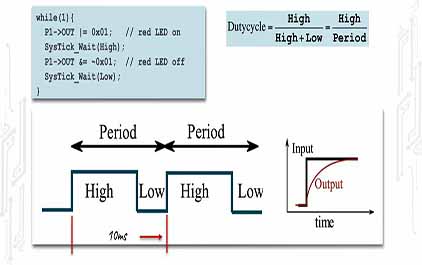 未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - PWM
未学习 TI-RSLK 模块 9 - 讲座视频 - SysTick 计时器 - PWM
-
 未学习 TI-RSLK 模块 9 - 实验视频 9.1 - 演示通过调整占空比来运行检测信号
未学习 TI-RSLK 模块 9 - 实验视频 9.1 - 演示通过调整占空比来运行检测信号
-
 未学习 TI-RSLK 模块 9 - 实验视频 9.2 - 演示通过运行正弦波输出来调整功率
未学习 TI-RSLK 模块 9 - 实验视频 9.2 - 演示通过运行正弦波输出来调整功率
-
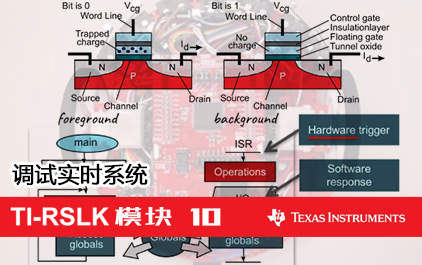 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 理论
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 理论
-
 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 中断
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - 中断
-
 未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - SysTick 中断
未学习 TI-RSLK 模块 10 - 讲座视频 - 调试实时系统 - SysTick 中断
-
 未学习 TI-RSLK 模块 10 - 实验视频 - 演示运行线传感器和黑匣子记录器
未学习 TI-RSLK 模块 10 - 实验视频 - 演示运行线传感器和黑匣子记录器
-
 未学习 TI-RSLK 模块 11 - 讲座视频 - 液晶显示屏
未学习 TI-RSLK 模块 11 - 讲座视频 - 液晶显示屏
-
 未学习 TI-RSLK 模块 11 - 实验视频 11.1 - 演示 LCD 界面
未学习 TI-RSLK 模块 11 - 实验视频 11.1 - 演示 LCD 界面
-
 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
-
 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
-
 未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
-
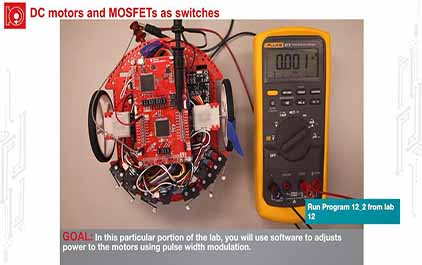
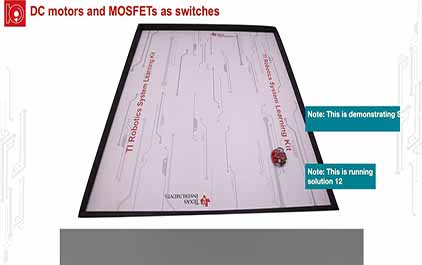 未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动
未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动
-
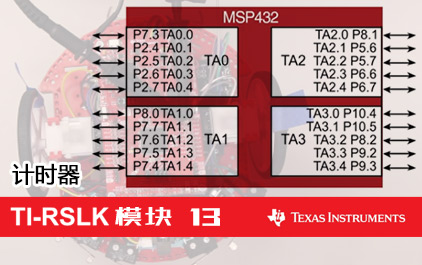 未学习 TI-RSLK 模块 13 - 讲座视频 - 周期性输入
未学习 TI-RSLK 模块 13 - 讲座视频 - 周期性输入
-
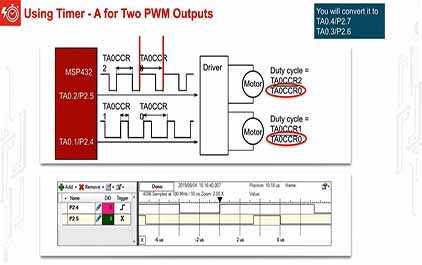 未学习 TI-RSLK 模块 13 - 讲座视频 - 脉宽调制
未学习 TI-RSLK 模块 13 - 讲座视频 - 脉宽调制
-
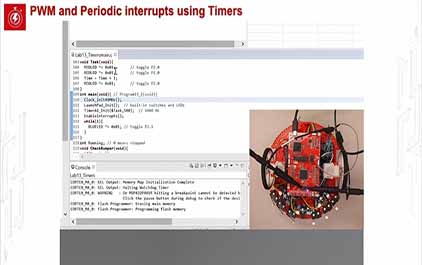
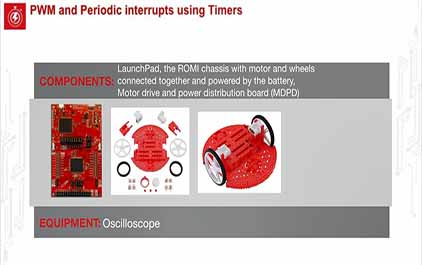 未学习 TI-RSLK 模块 13 - 实验视频 13.1 - 通过计时器产生的 PWM 输出来旋转电机
未学习 TI-RSLK 模块 13 - 实验视频 13.1 - 通过计时器产生的 PWM 输出来旋转电机
-
 未学习 TI-RSLK 模块 13 - 实验视频 13.2 - 测量中断延迟
未学习 TI-RSLK 模块 13 - 实验视频 13.2 - 测量中断延迟
-
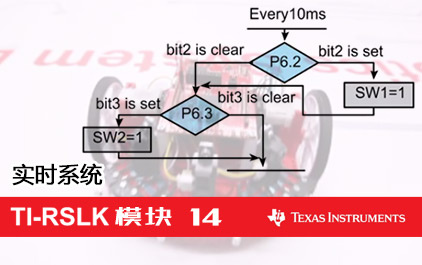 未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 理论
未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 理论
-
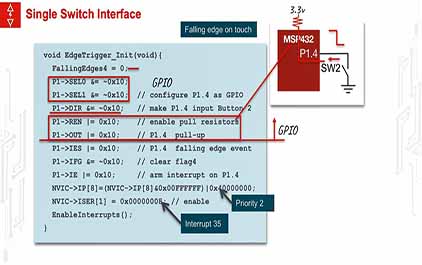 未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 边沿触发中断
未学习 TI-RSLK 模块 14 - 讲座视频 - 实时系统 - 边沿触发中断
-
 未学习 TI-RSLK 模块 14 - 实验视频 14.1 - 使用边沿触发中断为碰撞开关提供实时响应
未学习 TI-RSLK 模块 14 - 实验视频 14.1 - 使用边沿触发中断为碰撞开关提供实时响应
-
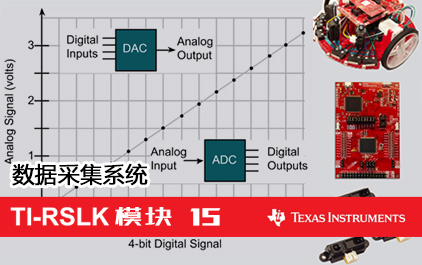 未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 理论
未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 理论
-
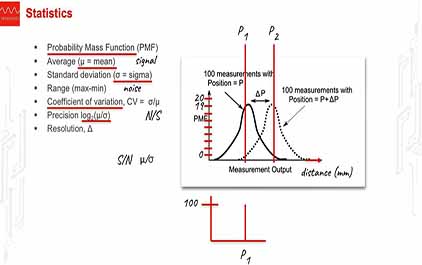 未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 性能测量
未学习 TI-RSLK 模块 15 - 讲座视频 - 数据采集系统 - 性能测量
-
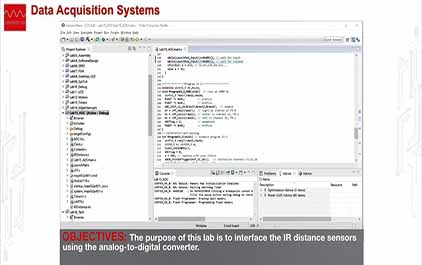 未学习 TI-RSLK 模块 15 - 实验视频 15.1 - 使用 ADC 测试红外距离测量
未学习 TI-RSLK 模块 15 - 实验视频 15.1 - 使用 ADC 测试红外距离测量
-
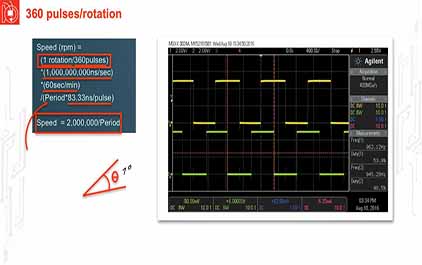
 未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 输入捕捉
未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 输入捕捉
-
 未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 接口
未学习 TI-RSLK 模块 16 - 讲座视频 - 转速计 - 接口
-
 未学习 TI-RSLK 模块 16 - 实验视频 16.1 - 测试转速计以测量速度
未学习 TI-RSLK 模块 16 - 实验视频 16.1 - 测试转速计以测量速度
-
 未学习 TI-RSLK 模块 17 - 讲座视频 - 控制系统
未学习 TI-RSLK 模块 17 - 讲座视频 - 控制系统
-
 未学习 TI-RSLK 模块 17 - 实验视频 17.1 - 演示控制系统 - 积分控制
未学习 TI-RSLK 模块 17 - 实验视频 17.1 - 演示控制系统 - 积分控制
-
 未学习 TI-RSLK 模块 17 - 实验视频 17.2 - 演示控制系统 - 比例控制
未学习 TI-RSLK 模块 17 - 实验视频 17.2 - 演示控制系统 - 比例控制
-
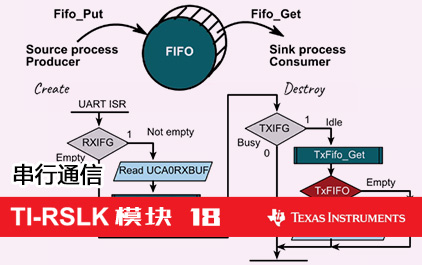 未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - UART
未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - UART
-
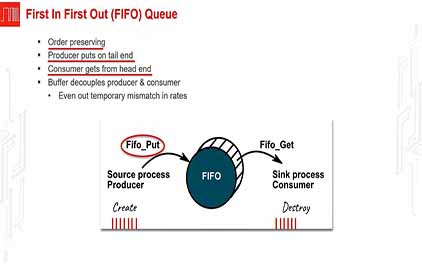 未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - FIFO
未学习 TI-RSLK 模块 18 - 讲座视频 - 串行通信 - FIFO
-
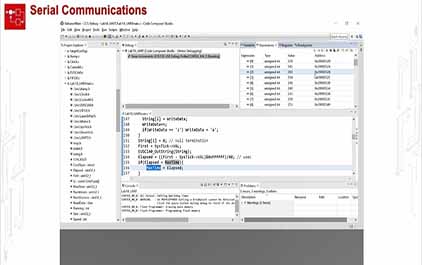 未学习 TI-RSLK 模块 18 - 实验视频 18.1 - 演示 UART
未学习 TI-RSLK 模块 18 - 实验视频 18.1 - 演示 UART
-
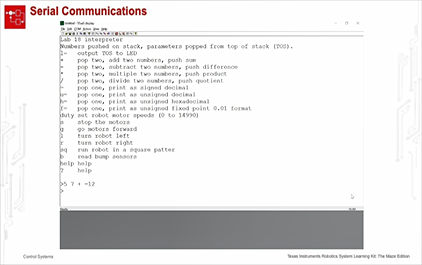 未学习 TI-RSLK 模块 18 - 实验视频 18.2 - 命令解释器
未学习 TI-RSLK 模块 18 - 实验视频 18.2 - 命令解释器
-
 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 无线
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 无线
-
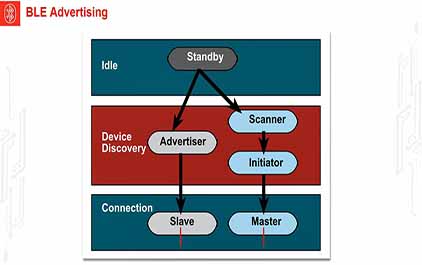 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 理论
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 理论
-
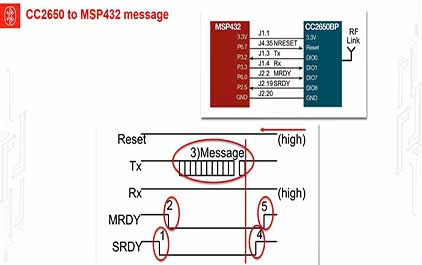 未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 简单网络处理器
未学习 TI-RSLK 模块 19 - 讲座视频 - 低功耗蓝牙 - 简单网络处理器
-
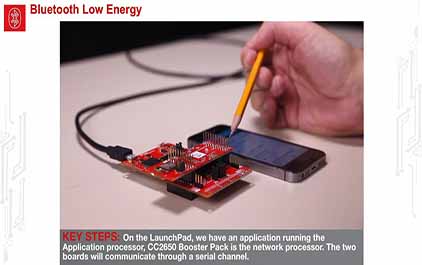 未学习 TI-RSLK 模块 19 - 实验视频 19.1 - 演示 BLE
未学习 TI-RSLK 模块 19 - 实验视频 19.1 - 演示 BLE
-
 未学习 TI-RSLK 模块 19 - 实验视频 19.2 - 与机器人通信
未学习 TI-RSLK 模块 19 - 实验视频 19.2 - 与机器人通信




































































 视频简介
视频简介
TI-RSLK 模块 2 - 讲座视频 – 电压、电流和功率
电压、电流和功率将会覆盖电阻器、电容器和LED。

