
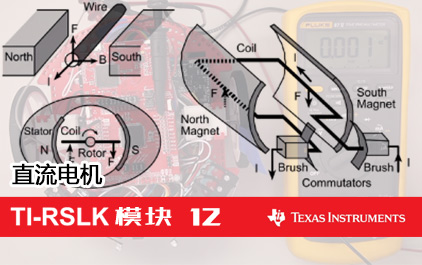
有刷直流 (BDC) 电机驱动器
最新课程
- 电源培训授证项目-在线答疑Q&A 直播回放
- 高压 MOSFET/IGBT 栅极驱动原理与设计 (下)
- 高压 MOSFET/IGBT 栅极驱动原理与设计 (上)
- C2000™ Σ-Δ 滤波器调制器 (SDFM)
- C2000™ 的传感和处理功能
- C2000™ 可配置逻辑块 (CLB)
- C2000™ 模数转换器 (ADC) 培训
- C2000™ 增强型脉宽调制器 (ePWM)
- Code Composer Studio™ 快速提示
- 用于优化电源性能的 PCB 布局指南
热门课程
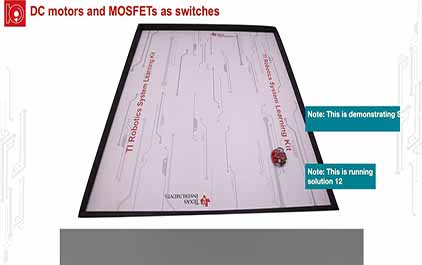
TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动
Loading the player...


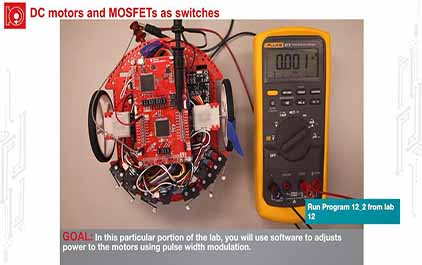
本实验的目的 LaunchPad。 在本实验的 LaunchPad、机箱、 两个电机 在本实验的 我们将考查,当把两个占空比 机器人能够在多大程度上 我们为机器人设置了 此机器人将执行一组 首先,它以相同的 前进。 然后,它将停止。 接着,它将倒退。 再接着,它将 如果撞到墙壁, 您会注意到, 根本不是绝对的直线, 也是如此。 此外,当它 转弯效果 机器人不知道 为了解决 机器人需要反馈。 本课程中有 位于底部的 顶部的红外传感器, 之间的距离。 实际上, 还具有转速计, 测量滚轮的 在本实验中, 使用 调节功率与 机器人需要 来完成复杂任务,
本实验的目的
LaunchPad。
在本实验的
LaunchPad、机箱、
两个电机
在本实验的
我们将考查,当把两个占空比
机器人能够在多大程度上
我们为机器人设置了
此机器人将执行一组
首先,它以相同的
前进。
然后,它将停止。
接着,它将倒退。
再接着,它将
如果撞到墙壁,
您会注意到,
根本不是绝对的直线,
也是如此。
此外,当它
转弯效果
机器人不知道
为了解决
机器人需要反馈。
本课程中有
位于底部的
顶部的红外传感器,
之间的距离。
实际上,
还具有转速计,
测量滚轮的
在本实验中,
使用
调节功率与
机器人需要
来完成复杂任务,
手机看
收藏本课程
扫码用手机观看
-
 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 物理
-
 未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
未学习 TI-RSLK 模块 12 - 讲座视频 - 直流电机 - 接口
-
 未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
未学习 TI-RSLK 模块 12 - 实验视频 12.1 - 演示电机基础知识
-
 未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动
未学习 TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动



 视频简介
视频简介
TI-RSLK 模块 12 - 实验视频 12.2 - 演示机器人以预设模式移动
所属课程:TI-RSLK 模块 12 - 直流电机
发布时间:2018.08.27
视频集数:4
本节视频时长:00:01:45
该实验的目标是了解在设置占空比为等值的情况下,机器人将如何直线运动。

