2.1 TI汽车mmWave传感器设备概述
Loading the player...
将在30s后自动为您播放下一课程
大家好,欢迎 观看 TI 的 AWR1x 系列基于 CMOS 的 单芯片毫米波雷达传感器的 器件概述。 在此视频中,我们将 首先扼要介绍 TI 的 毫米波传感器, 了解信号处理链 与这些器件的 关系,并介绍 几种可以在其中部署 这些器件的系统拓扑。 然后,我们详细 介绍这些器件, 其中会涉及主要 功能块。 最后,我们将了解 启动模式并简要概述 可使用 TI 的 毫米波传感器 进行开发的 软件开发平台。 让我们首先简要 概述一下这些器件。 AWR1243、1443 和 1642 属于 AWR1x 系列单芯片 毫米波雷达 传感器,适用于先进的 驾驶员辅助系统 或 ADAS 应用。 这些器件 能够在 76 至 81 GHz 频段内运行,具有高达 4 GHz 的连续线性调频脉冲带宽。 这些器件是采用 TI 的 低功耗 45 纳米射频 CMOS 技术构建的, 并可在极小的 封装中实现 前所未有的集成度。 这些雷达传感器 为先进的汽车应用 提供了适用于 低功耗和 自监控超精确雷达 系统的理想 解决方案,例如 自适应巡航 控制、自动紧急 刹车、盲点检测、 行人或骑行者 保护、防碰撞、 市区驾驶和 自动化公路驾驶, 仅以这些为例。 通过集成模拟 和数字组件, 包括多个发射 和接收链、 PLL、A2D 转换器、 ARM Cortex-R4F MCU 或 C674x DSP 或 FFT 加速器、 存储器和各种 I/O 接口, 此器件系统可以从 AWR1243 雷达前端一起扩展到 完整的单芯片雷达。 这些器件还将 射频的连续自监控 和校准特性 以及模拟功能 集成到了专用的、 基于内置 ARM R4F 的 无线电过程子系统中, 负责进行 前端的配置、 控制和校准。 此部分介绍了 这些器件的主要特性。 这些传感器基于 FMCW 雷达技术, 能够在 76 至 81 GHz 的 频率范围内运行, 并且支持高达 4 GHz 的 线性调频脉冲带宽。 为 MIMO 雷达的 运行提供了 多达三个发射链 和四个接收链。 TI 的毫米波 传感器支持 高度可编程且灵活的 线性调频脉冲剖面, 以便在同一个雷达 帧中支持多个感应 剖面。 1443 具有用于 FFT 运算的 板载硬件加速器 和基于连续虚警率 或 CFAR 的检测 算法,而 1642 为 FMCW 信号处理 提供功能全面的 C76X 高性能 DSP 内核以及 群集、跟踪和 物体分类等 高级算法。 有两个 ARM Cortex 软件 FMCU 以 200 MHz 的频率运行。 其中一个已锁定, 供校准和监控 引擎,即无线电 子系统使用。 这个 R4F 通过 TI 提供的固件进行编程, 不适用于 用户代码。 但第二个 Cortex 软件 F 可用于进行 高级应用处理。 这些器件支持 各种工业标准 输入输出接口,例如 CAN、SPI、I2C、UART, 并且支持使用 CSI2 进行 高速原始 ADC 数据输出。 这个幻灯片显示了典型 FMCW 雷达链的组件, 并将它们映射到了 12、14 和 16x 器件的 信号处理功能。 接收器链始于 接收反射雷达 信号的 射频前端, 该反射雷达信号 与发射器信号混合, 生成拍频 信号并 传输到 ADC。 ADC 将模拟信号 转换为数字样本, 并对样本 进行预处理 以便进行数字处理。 对数字化样本进行 连续 FFT 运算 以进行距离、速度 和到达角计算。 可以使用 14xx 器件上的 板载雷达硬件加速器 来卸载 FFT 和检测处理, 从而获得 点云输出。 可以使用 16xx 器件, 利用板载的 C674x DSP 来运行高级群集、 跟踪和物体 分类算法。 此处,我们 显示了几种 可以在先进的汽车 应用中部署这些器件的 拓扑。 第一个应用显示了 四个 AWR1243 器件 采用级联配置 进行连接 以实现高分辨率成像。 1242 雷达 前端在器件 引脚边界处 提供高频率 时钟合成器输出,此输出可 以馈送给其他 AWR1242 器件以使它们 都同步运行 并充当单一传感器, 从而实现更高的角分辨率。 使用级联配置, 角分辨率 可以随着器件 数量的增加 而以指数方式提高, 因为角度单元总数 是实际发射和 接收通道总数的 乘积。 例如,具有三个发射 天线和四个接收 天线的单个 AWR1243 提供 四乘以三,即 12 个角度单元。 但以级联模式使用 两个 AWR1242 器件时, 角度单元数 增加到六乘以八, 即 48。 雷达传感器 通过 CSI2 连接到外部处理器, 该外部处理器 对来自传感器的原始 ADC 数据 进行 FMCW 信号处理。 该处理器还处理 雷达传感器的 配置和控制。 同样,可以对 中距离雷达或 角落雷达应用 使用包含两个 AWR1243 器件的 较小级联配置, 如第二幅图片中所示。 第三个应用 显示了单个 AWR1243 通过 CSI2 连接到 外部处理器 以实现远距离雷达。 此配置适用于 自动化公路驾驶 和自适应巡航 控制应用, 因此,应以能够实现 最大距离和速度的 方式配置传感器。 使用单元外 [听不清] 来实现更远的距离。 最后一幅图片显示了 一种卫星配置, 其中多个 1642 器件连接到了 一个外部应用处理器 RF-BGA 或 CAN-FD。 每个 1642 器件均使用 片上 C674x DSP 处理其雷达传感器数据, 并向外部处理器提供 点云输出。 可以使用 1642 上的 DSP 来运行高级群集 和跟踪算法, 并为外部 处理器提供 更智能的输入。 外部处理器 收集各自的输出 并做出适合应用的 更高级决策。 此配置可在 自动市区驾驶中 用于环境感应。 再来看看 下一部分, 我们将更详细地介绍 基于毫米波的传感器器件 以便了解 各个功能块。 这张图片显示了 AWR1x 器件系列的 复合方框图。 1243 雷达 前端只包括 射频/模拟子系统和 无线电子系统记录。 14 和 16x 器件 都包括主子系统, 而 DSP 子系统 仅存在于 16x 上。 器件架构 可以分为 以下主要块: 射频或模拟子系统、 雷达子系统和 主子系统。 除了这三个 系统外, 16xx 器件还包括 DSP 子系统, 在这张图片中 以蓝色标出。 让我们更细致地看一下 射频和模拟子系统。 这个子系统包括 射频和模拟电路, 即合成器、PA、LNA、 混频器、IF 和 ADC。 这个子系统还包括 晶体振荡器和 温度传感器。 射频和模拟 子系统可以 分为三个 子组件, 即时钟子系统、 发射子系统 和接收子系统。 我们将更详细地 介绍这些子组件, 首先从时钟 子系统开始。 时钟子系统 从 40 MHz 晶体的 输入基准生成 76 至 81 GHz 的频率。 它有一个内置的 振荡器电路, 其后面是一个清理 PLL 和一个射频合成器电路。 之后,4x 乘法器 将会处理射频 合成器的输出以便 在 76 至 81 GHz 频谱内 产生所需的频率。 射频合成器输出 由时序引擎块进行 调制以便产生 所需的波形, 确保传感器有效运行。 时序引擎 极其灵活, 可通过基于 R4F 的 无线电控制器子系统 进行编程。 可以在器件 引脚边界处 使用射频 合成器的 输出以实现多芯片 级联配置。 系统唤醒后,清理 PLL 也会为主机处理器提供 参考时钟。 时钟子系统也 具有用于检测 是否存在晶体 并监控发生器 时钟质量的 内置机制。 接下来我们讨论一下射频和 模拟子系统的组件, 即发射子系统。 根据器件不同, 发射子系统 包含两个或三个 并行发射链。 每个发射链都有 独立的相位 和振幅控制。 最多可以 同时运行 两个发射链。 但所有三个链 可以通过时间 多路复用方式一起运行。 该器件还支持 MIMO 雷达的 二进制相位调制和干扰抑制。 最后,我们看一下 接收子系统。 接收子系统包含 四个并行通道, 每个接收通道均包含 LNA、混频器、 IF 滤波、A2D 转换和抽取。 所有四个接收通道 可以同时运行。 还提供单独的 通电选项 以实现 系统优化。 与传统的仅卷带 接收器不同, TI 的雷达传感器支持 复基带架构, 这种架构使用正交混频器 以及双通道 IF 和 ADC 链 为每个接收器通道 提供复数 I/Q 输出。 带通 IF 链 具有可配置的 较低截止频率, 约为 350 kHz。 连续时间 Σ-Δ ADC 支持高达 15 MHz 的带宽。 现在让我们看一看 下一个功能块, 即雷达子系统。 雷达处理器实际上 是以 200 MHz 的频率运行的 第二个专用 ARM Cortex-R4F 微控制器。 请注意,此处理器 由 TI 进行编程, 负责管理 校准不当、自检 和监控功能。 此处理器不适用于 客户应用。 在主子系统上 运行的用户应用 不能直接访问 雷达系统。 主系统通过 明确定义的 API 消息来访问 雷达子系统, 这些消息是通过 硬件邮箱发送的。 这个接口也称为 mmWaveLink。 TI 的毫米波 SDK 包括 mmWaveLink API。 下一个功能块 是主子系统。 主子系统包含一个 以 200 MHz 的频率 计时的 ARM Cortex-R4F 处理器, 用于运行用户应用代码。 在这个处理器上 执行的用户应用程序 控制器件的 总体运行, 包括通过明确 定义的 API 消息 进行雷达控制、在雷达硬件 加速器或 DSP 以及用于 外部接口的外设的 协助下进行 雷达信号处理。 这个子系统还包括 14 或 16xx 器件上 可用的各种 外部接口。 提供了一个四路串行 外设接口或 QSPI, 可用于直接从 串行闪存 下载客户代码。 包括一个 CAN 接口, 可用于直接从器件 与画布通信。 提供一个 SPI/I2C 接口, 用于进行电源管理 IC 或支付控制。 对于更复杂的 应用,器件 可以在外部 MCU 的 控制下运行, 该 MCU 可以通过 SPI 接口 与 14 或 16xx 器件通信。 下一个功能块 是 DSP 子系统。 DSP 子系统仅 存在于 16xx 器件上, 它包含 TI 的 高性能 C674x DSP, 用于进行 FMCW 信号处理, 包括 FFT 和检测, 还可用于高级 雷达信号处理。 这可以使 16xx 用作 完整的单芯片雷达, 并具有适用于群集、 跟踪和物体分类的 高级功能。 下面看一下雷达 硬件加速器, 这是本器件概述中的 最后一个功能块。 雷达硬件加速器 仅在 14xx 器件上 可用。 它可以从 主处理器上卸载 进行某些常用计算 和 FMCW 雷达信号 处理。 FMCW 雷达信号处理 涉及使用 FFT 和对数幅度 计算,从而 在距离、速度和角度 维度之间获得雷达 图像。 FMCW 雷达信号处理 中的一些常用功能 可以在雷达硬件 加速器内执行, 同时仍能保持 在主系统处理器中 实现其他专有 算法的灵活性。 如此图中 所示,加速器 包含两个功能部分。 第一个功能 部分用于 FFT 和相关预处理 以及对数幅度运算。 第二个 功能部分 提供基于 CFAR 或 恒虚警率的 检测算法。 进出雷达硬件 加速器的数据移动 基于 TI 的 EDMA 或 增强型直接存储器 存取控制器。 请参阅雷达 硬件加速器 用户指南或雷达硬件 加速器在线培训 以了解更多详细信息。 介绍完了各个 功能块后, 我们现在简要 看一下 TI 的 雷达器件上可用的启动模式。 TI 的毫米波雷达器件 支持两种启动模式, 即闪存模式 和功能模式。 通过按照 器件数据表中 所述的方式配置 加电感测或 SOP 引脚, 可以选择所需的 启动模式。 我们先谈一谈 闪存模式。 这种启动模式用于 将程序二进制映像 刻录或存储到 QSPI 串行闪存中。 启用这种启动模式后, 引导加载程序 将启用 UART 驱动程序 并会获得由应用二进制 映像构成的数据流。 在接收到有效的 应用二进制映像时, 引导加载程序会将该二进制 映像存储到串行闪存的 相应部分。 可以在软件开发过程中 使用这种启动模式 来升级闪存上的 应用二进制文件。 第二种模式是 功能或部署模式, 用于使用先前 存储的应用 二进制文件从 QSPI 闪存启动器件。 选择这种启动模式后, 引导加载程序 将会在 QSPI 闪存中查找 有效的应用程序映像。 在找到有效的映像后, 引导加载程序 会将该映像复制到 主子系统的存储器中 以开始启动过程。 通过这种方式, 器件将从闪存 自主启动。 在本次演示的 最后一部分, 我们快速了解一下 可用于对 TI 的 毫米波雷达器件进行 编程的软件平台。 TI 的毫米波雷达传感器 有丰富的软件产品作为辅助, 其中包括 SDK、 TI 设计、示例 和工具。 软件平台分为 三个主要组成部分, 如图所示。 第一部分是 毫米波 SDK, 它提供各种 基础软件组件, 例如 TI 的 SYS/BIOS RTOS 和 与雷达器件上 提供的硬件外设 相对应的驱动程序。 它还包括 mmWaveLink 和 毫米波 API 以支持 使用高级 API 对雷达传感器进行编程。 它还包括适用于 C67x DSP 和 雷达硬件加速器的 信号处理库。 除了毫米波 SDK 外, 软件产品还包括 开包即用演示、 各种 TI 设计 和实验。 通过开包即用演示, 用户可以 快速评估 雷达 EVM 并可视化 目标物体的 距离、速度和角度。 TI 设计演示 TI 毫米波雷达 在特定应用中的 适用性, 例如液位感应和 交通监控应用。 最后,但同样重要的是, 我们有 mmWave Studio, 它提供了系统估算器工具 和原始 ADC 数据 捕获功能。 我们将在下一张 幻灯片中介绍 系统估算器工具。 定义线性调频脉冲配置 对 FMCW 雷达的正常运行 非常重要。 系统估算器 工具的目的 是简化为 TI 的 毫米波雷达 传感器定义 线性调频脉冲 以实现所需感应配置 这项复杂任务。 使用这个工具, 用户可以提供 应用级输入, 例如所需的最大距离、 速度、距离分辨率、 速度分辨率等, 并且输出线性 调频脉冲配置, 此配置可与毫米波 API 配合使用, 以便相应地对 传感器进行编程。 它还估算与线性调频 脉冲配置相对应的 雷达数据队列 存储器要求, 并还标记 越界参数。 这张图片显示了 TI 毫米波 SDK 的 架构图。 用蓝色标示的 组件由 SDK 提供, 而用红色标示的组件 表示应用代码。 我们可以看到, SDK 采用模块化设计, 并且分为 不同的层。 每个层为其 上面的层提供 明确定义的 API, 因而降低了复杂性。 例如毫米波 前端固件, 它在雷达 子系统上 运行,完全包含 射频和模拟 功能的配置、 控制、校准和 监控。 它导出 mmWaveLink API,使用此 API, 主子系统可与其 通信,从而控制和 监视传感器前端。 毫米波 SDK 不仅 实现 mmWaveLink 的 应用侧, 而且还提供 毫米波 API 的 另一个级别的抽象。 该 API 提供高级 功能,用于 对雷达前端进行编程和控制。 毫米波 API 在内部 使用 mmWaveLink API。 这张图片显示了 毫米波 SDK 的目录结构。 TI 汽车毫米波雷达 传感器概述至此 结束。 要了解有关这些 器件的更多信息, 请参阅这些资源。 谢谢。
大家好,欢迎 观看 TI 的 AWR1x 系列基于 CMOS 的 单芯片毫米波雷达传感器的 器件概述。 在此视频中,我们将 首先扼要介绍 TI 的 毫米波传感器, 了解信号处理链 与这些器件的 关系,并介绍 几种可以在其中部署 这些器件的系统拓扑。 然后,我们详细 介绍这些器件, 其中会涉及主要 功能块。 最后,我们将了解 启动模式并简要概述 可使用 TI 的 毫米波传感器 进行开发的 软件开发平台。 让我们首先简要 概述一下这些器件。 AWR1243、1443 和 1642 属于 AWR1x 系列单芯片 毫米波雷达 传感器,适用于先进的 驾驶员辅助系统 或 ADAS 应用。 这些器件 能够在 76 至 81 GHz 频段内运行,具有高达 4 GHz 的连续线性调频脉冲带宽。 这些器件是采用 TI 的 低功耗 45 纳米射频 CMOS 技术构建的, 并可在极小的 封装中实现 前所未有的集成度。 这些雷达传感器 为先进的汽车应用 提供了适用于 低功耗和 自监控超精确雷达 系统的理想 解决方案,例如 自适应巡航 控制、自动紧急 刹车、盲点检测、 行人或骑行者 保护、防碰撞、 市区驾驶和 自动化公路驾驶, 仅以这些为例。 通过集成模拟 和数字组件, 包括多个发射 和接收链、 PLL、A2D 转换器、 ARM Cortex-R4F MCU 或 C674x DSP 或 FFT 加速器、 存储器和各种 I/O 接口, 此器件系统可以从 AWR1243 雷达前端一起扩展到 完整的单芯片雷达。 这些器件还将 射频的连续自监控 和校准特性 以及模拟功能 集成到了专用的、 基于内置 ARM R4F 的 无线电过程子系统中, 负责进行 前端的配置、 控制和校准。 此部分介绍了 这些器件的主要特性。 这些传感器基于 FMCW 雷达技术, 能够在 76 至 81 GHz 的 频率范围内运行, 并且支持高达 4 GHz 的 线性调频脉冲带宽。 为 MIMO 雷达的 运行提供了 多达三个发射链 和四个接收链。 TI 的毫米波 传感器支持 高度可编程且灵活的 线性调频脉冲剖面, 以便在同一个雷达 帧中支持多个感应 剖面。 1443 具有用于 FFT 运算的 板载硬件加速器 和基于连续虚警率 或 CFAR 的检测 算法,而 1642 为 FMCW 信号处理 提供功能全面的 C76X 高性能 DSP 内核以及 群集、跟踪和 物体分类等 高级算法。 有两个 ARM Cortex 软件 FMCU 以 200 MHz 的频率运行。 其中一个已锁定, 供校准和监控 引擎,即无线电 子系统使用。 这个 R4F 通过 TI 提供的固件进行编程, 不适用于 用户代码。 但第二个 Cortex 软件 F 可用于进行 高级应用处理。 这些器件支持 各种工业标准 输入输出接口,例如 CAN、SPI、I2C、UART, 并且支持使用 CSI2 进行 高速原始 ADC 数据输出。 这个幻灯片显示了典型 FMCW 雷达链的组件, 并将它们映射到了 12、14 和 16x 器件的 信号处理功能。 接收器链始于 接收反射雷达 信号的 射频前端, 该反射雷达信号 与发射器信号混合, 生成拍频 信号并 传输到 ADC。 ADC 将模拟信号 转换为数字样本, 并对样本 进行预处理 以便进行数字处理。 对数字化样本进行 连续 FFT 运算 以进行距离、速度 和到达角计算。 可以使用 14xx 器件上的 板载雷达硬件加速器 来卸载 FFT 和检测处理, 从而获得 点云输出。 可以使用 16xx 器件, 利用板载的 C674x DSP 来运行高级群集、 跟踪和物体 分类算法。 此处,我们 显示了几种 可以在先进的汽车 应用中部署这些器件的 拓扑。 第一个应用显示了 四个 AWR1243 器件 采用级联配置 进行连接 以实现高分辨率成像。 1242 雷达 前端在器件 引脚边界处 提供高频率 时钟合成器输出,此输出可 以馈送给其他 AWR1242 器件以使它们 都同步运行 并充当单一传感器, 从而实现更高的角分辨率。 使用级联配置, 角分辨率 可以随着器件 数量的增加 而以指数方式提高, 因为角度单元总数 是实际发射和 接收通道总数的 乘积。 例如,具有三个发射 天线和四个接收 天线的单个 AWR1243 提供 四乘以三,即 12 个角度单元。 但以级联模式使用 两个 AWR1242 器件时, 角度单元数 增加到六乘以八, 即 48。 雷达传感器 通过 CSI2 连接到外部处理器, 该外部处理器 对来自传感器的原始 ADC 数据 进行 FMCW 信号处理。 该处理器还处理 雷达传感器的 配置和控制。 同样,可以对 中距离雷达或 角落雷达应用 使用包含两个 AWR1243 器件的 较小级联配置, 如第二幅图片中所示。 第三个应用 显示了单个 AWR1243 通过 CSI2 连接到 外部处理器 以实现远距离雷达。 此配置适用于 自动化公路驾驶 和自适应巡航 控制应用, 因此,应以能够实现 最大距离和速度的 方式配置传感器。 使用单元外 [听不清] 来实现更远的距离。 最后一幅图片显示了 一种卫星配置, 其中多个 1642 器件连接到了 一个外部应用处理器 RF-BGA 或 CAN-FD。 每个 1642 器件均使用 片上 C674x DSP 处理其雷达传感器数据, 并向外部处理器提供 点云输出。 可以使用 1642 上的 DSP 来运行高级群集 和跟踪算法, 并为外部 处理器提供 更智能的输入。 外部处理器 收集各自的输出 并做出适合应用的 更高级决策。 此配置可在 自动市区驾驶中 用于环境感应。 再来看看 下一部分, 我们将更详细地介绍 基于毫米波的传感器器件 以便了解 各个功能块。 这张图片显示了 AWR1x 器件系列的 复合方框图。 1243 雷达 前端只包括 射频/模拟子系统和 无线电子系统记录。 14 和 16x 器件 都包括主子系统, 而 DSP 子系统 仅存在于 16x 上。 器件架构 可以分为 以下主要块: 射频或模拟子系统、 雷达子系统和 主子系统。 除了这三个 系统外, 16xx 器件还包括 DSP 子系统, 在这张图片中 以蓝色标出。 让我们更细致地看一下 射频和模拟子系统。 这个子系统包括 射频和模拟电路, 即合成器、PA、LNA、 混频器、IF 和 ADC。 这个子系统还包括 晶体振荡器和 温度传感器。 射频和模拟 子系统可以 分为三个 子组件, 即时钟子系统、 发射子系统 和接收子系统。 我们将更详细地 介绍这些子组件, 首先从时钟 子系统开始。 时钟子系统 从 40 MHz 晶体的 输入基准生成 76 至 81 GHz 的频率。 它有一个内置的 振荡器电路, 其后面是一个清理 PLL 和一个射频合成器电路。 之后,4x 乘法器 将会处理射频 合成器的输出以便 在 76 至 81 GHz 频谱内 产生所需的频率。 射频合成器输出 由时序引擎块进行 调制以便产生 所需的波形, 确保传感器有效运行。 时序引擎 极其灵活, 可通过基于 R4F 的 无线电控制器子系统 进行编程。 可以在器件 引脚边界处 使用射频 合成器的 输出以实现多芯片 级联配置。 系统唤醒后,清理 PLL 也会为主机处理器提供 参考时钟。 时钟子系统也 具有用于检测 是否存在晶体 并监控发生器 时钟质量的 内置机制。 接下来我们讨论一下射频和 模拟子系统的组件, 即发射子系统。 根据器件不同, 发射子系统 包含两个或三个 并行发射链。 每个发射链都有 独立的相位 和振幅控制。 最多可以 同时运行 两个发射链。 但所有三个链 可以通过时间 多路复用方式一起运行。 该器件还支持 MIMO 雷达的 二进制相位调制和干扰抑制。 最后,我们看一下 接收子系统。 接收子系统包含 四个并行通道, 每个接收通道均包含 LNA、混频器、 IF 滤波、A2D 转换和抽取。 所有四个接收通道 可以同时运行。 还提供单独的 通电选项 以实现 系统优化。 与传统的仅卷带 接收器不同, TI 的雷达传感器支持 复基带架构, 这种架构使用正交混频器 以及双通道 IF 和 ADC 链 为每个接收器通道 提供复数 I/Q 输出。 带通 IF 链 具有可配置的 较低截止频率, 约为 350 kHz。 连续时间 Σ-Δ ADC 支持高达 15 MHz 的带宽。 现在让我们看一看 下一个功能块, 即雷达子系统。 雷达处理器实际上 是以 200 MHz 的频率运行的 第二个专用 ARM Cortex-R4F 微控制器。 请注意,此处理器 由 TI 进行编程, 负责管理 校准不当、自检 和监控功能。 此处理器不适用于 客户应用。 在主子系统上 运行的用户应用 不能直接访问 雷达系统。 主系统通过 明确定义的 API 消息来访问 雷达子系统, 这些消息是通过 硬件邮箱发送的。 这个接口也称为 mmWaveLink。 TI 的毫米波 SDK 包括 mmWaveLink API。 下一个功能块 是主子系统。 主子系统包含一个 以 200 MHz 的频率 计时的 ARM Cortex-R4F 处理器, 用于运行用户应用代码。 在这个处理器上 执行的用户应用程序 控制器件的 总体运行, 包括通过明确 定义的 API 消息 进行雷达控制、在雷达硬件 加速器或 DSP 以及用于 外部接口的外设的 协助下进行 雷达信号处理。 这个子系统还包括 14 或 16xx 器件上 可用的各种 外部接口。 提供了一个四路串行 外设接口或 QSPI, 可用于直接从 串行闪存 下载客户代码。 包括一个 CAN 接口, 可用于直接从器件 与画布通信。 提供一个 SPI/I2C 接口, 用于进行电源管理 IC 或支付控制。 对于更复杂的 应用,器件 可以在外部 MCU 的 控制下运行, 该 MCU 可以通过 SPI 接口 与 14 或 16xx 器件通信。 下一个功能块 是 DSP 子系统。 DSP 子系统仅 存在于 16xx 器件上, 它包含 TI 的 高性能 C674x DSP, 用于进行 FMCW 信号处理, 包括 FFT 和检测, 还可用于高级 雷达信号处理。 这可以使 16xx 用作 完整的单芯片雷达, 并具有适用于群集、 跟踪和物体分类的 高级功能。 下面看一下雷达 硬件加速器, 这是本器件概述中的 最后一个功能块。 雷达硬件加速器 仅在 14xx 器件上 可用。 它可以从 主处理器上卸载 进行某些常用计算 和 FMCW 雷达信号 处理。 FMCW 雷达信号处理 涉及使用 FFT 和对数幅度 计算,从而 在距离、速度和角度 维度之间获得雷达 图像。 FMCW 雷达信号处理 中的一些常用功能 可以在雷达硬件 加速器内执行, 同时仍能保持 在主系统处理器中 实现其他专有 算法的灵活性。 如此图中 所示,加速器 包含两个功能部分。 第一个功能 部分用于 FFT 和相关预处理 以及对数幅度运算。 第二个 功能部分 提供基于 CFAR 或 恒虚警率的 检测算法。 进出雷达硬件 加速器的数据移动 基于 TI 的 EDMA 或 增强型直接存储器 存取控制器。 请参阅雷达 硬件加速器 用户指南或雷达硬件 加速器在线培训 以了解更多详细信息。 介绍完了各个 功能块后, 我们现在简要 看一下 TI 的 雷达器件上可用的启动模式。 TI 的毫米波雷达器件 支持两种启动模式, 即闪存模式 和功能模式。 通过按照 器件数据表中 所述的方式配置 加电感测或 SOP 引脚, 可以选择所需的 启动模式。 我们先谈一谈 闪存模式。 这种启动模式用于 将程序二进制映像 刻录或存储到 QSPI 串行闪存中。 启用这种启动模式后, 引导加载程序 将启用 UART 驱动程序 并会获得由应用二进制 映像构成的数据流。 在接收到有效的 应用二进制映像时, 引导加载程序会将该二进制 映像存储到串行闪存的 相应部分。 可以在软件开发过程中 使用这种启动模式 来升级闪存上的 应用二进制文件。 第二种模式是 功能或部署模式, 用于使用先前 存储的应用 二进制文件从 QSPI 闪存启动器件。 选择这种启动模式后, 引导加载程序 将会在 QSPI 闪存中查找 有效的应用程序映像。 在找到有效的映像后, 引导加载程序 会将该映像复制到 主子系统的存储器中 以开始启动过程。 通过这种方式, 器件将从闪存 自主启动。 在本次演示的 最后一部分, 我们快速了解一下 可用于对 TI 的 毫米波雷达器件进行 编程的软件平台。 TI 的毫米波雷达传感器 有丰富的软件产品作为辅助, 其中包括 SDK、 TI 设计、示例 和工具。 软件平台分为 三个主要组成部分, 如图所示。 第一部分是 毫米波 SDK, 它提供各种 基础软件组件, 例如 TI 的 SYS/BIOS RTOS 和 与雷达器件上 提供的硬件外设 相对应的驱动程序。 它还包括 mmWaveLink 和 毫米波 API 以支持 使用高级 API 对雷达传感器进行编程。 它还包括适用于 C67x DSP 和 雷达硬件加速器的 信号处理库。 除了毫米波 SDK 外, 软件产品还包括 开包即用演示、 各种 TI 设计 和实验。 通过开包即用演示, 用户可以 快速评估 雷达 EVM 并可视化 目标物体的 距离、速度和角度。 TI 设计演示 TI 毫米波雷达 在特定应用中的 适用性, 例如液位感应和 交通监控应用。 最后,但同样重要的是, 我们有 mmWave Studio, 它提供了系统估算器工具 和原始 ADC 数据 捕获功能。 我们将在下一张 幻灯片中介绍 系统估算器工具。 定义线性调频脉冲配置 对 FMCW 雷达的正常运行 非常重要。 系统估算器 工具的目的 是简化为 TI 的 毫米波雷达 传感器定义 线性调频脉冲 以实现所需感应配置 这项复杂任务。 使用这个工具, 用户可以提供 应用级输入, 例如所需的最大距离、 速度、距离分辨率、 速度分辨率等, 并且输出线性 调频脉冲配置, 此配置可与毫米波 API 配合使用, 以便相应地对 传感器进行编程。 它还估算与线性调频 脉冲配置相对应的 雷达数据队列 存储器要求, 并还标记 越界参数。 这张图片显示了 TI 毫米波 SDK 的 架构图。 用蓝色标示的 组件由 SDK 提供, 而用红色标示的组件 表示应用代码。 我们可以看到, SDK 采用模块化设计, 并且分为 不同的层。 每个层为其 上面的层提供 明确定义的 API, 因而降低了复杂性。 例如毫米波 前端固件, 它在雷达 子系统上 运行,完全包含 射频和模拟 功能的配置、 控制、校准和 监控。 它导出 mmWaveLink API,使用此 API, 主子系统可与其 通信,从而控制和 监视传感器前端。 毫米波 SDK 不仅 实现 mmWaveLink 的 应用侧, 而且还提供 毫米波 API 的 另一个级别的抽象。 该 API 提供高级 功能,用于 对雷达前端进行编程和控制。 毫米波 API 在内部 使用 mmWaveLink API。 这张图片显示了 毫米波 SDK 的目录结构。 TI 汽车毫米波雷达 传感器概述至此 结束。 要了解有关这些 器件的更多信息, 请参阅这些资源。 谢谢。
大家好,欢迎 观看 TI 的
AWR1x 系列基于 CMOS 的 单芯片毫米波雷达传感器的
器件概述。
在此视频中,我们将 首先扼要介绍 TI 的
毫米波传感器, 了解信号处理链
与这些器件的 关系,并介绍
几种可以在其中部署 这些器件的系统拓扑。
然后,我们详细 介绍这些器件,
其中会涉及主要 功能块。
最后,我们将了解 启动模式并简要概述
可使用 TI 的 毫米波传感器
进行开发的 软件开发平台。
让我们首先简要 概述一下这些器件。
AWR1243、1443 和 1642 属于
AWR1x 系列单芯片 毫米波雷达
传感器,适用于先进的 驾驶员辅助系统
或 ADAS 应用。
这些器件 能够在 76
至 81 GHz 频段内运行,具有高达 4 GHz 的连续线性调频脉冲带宽。
这些器件是采用 TI 的 低功耗 45 纳米射频
CMOS 技术构建的, 并可在极小的
封装中实现 前所未有的集成度。
这些雷达传感器 为先进的汽车应用
提供了适用于 低功耗和
自监控超精确雷达 系统的理想
解决方案,例如 自适应巡航
控制、自动紧急 刹车、盲点检测、
行人或骑行者 保护、防碰撞、
市区驾驶和 自动化公路驾驶,
仅以这些为例。
通过集成模拟 和数字组件,
包括多个发射 和接收链、
PLL、A2D 转换器、 ARM Cortex-R4F MCU
或 C674x DSP 或 FFT 加速器、
存储器和各种 I/O 接口, 此器件系统可以从 AWR1243
雷达前端一起扩展到 完整的单芯片雷达。
这些器件还将 射频的连续自监控
和校准特性 以及模拟功能
集成到了专用的、 基于内置 ARM R4F 的
无线电过程子系统中, 负责进行
前端的配置、 控制和校准。
此部分介绍了 这些器件的主要特性。
这些传感器基于 FMCW 雷达技术,
能够在 76 至 81 GHz 的 频率范围内运行,
并且支持高达 4 GHz 的 线性调频脉冲带宽。
为 MIMO 雷达的 运行提供了
多达三个发射链 和四个接收链。
TI 的毫米波 传感器支持
高度可编程且灵活的 线性调频脉冲剖面,
以便在同一个雷达 帧中支持多个感应
剖面。
1443 具有用于 FFT 运算的 板载硬件加速器
和基于连续虚警率 或 CFAR 的检测
算法,而 1642 为
FMCW 信号处理 提供功能全面的
C76X 高性能 DSP 内核以及
群集、跟踪和 物体分类等
高级算法。
有两个 ARM Cortex 软件
FMCU 以 200 MHz 的频率运行。
其中一个已锁定, 供校准和监控
引擎,即无线电 子系统使用。
这个 R4F 通过 TI 提供的固件进行编程,
不适用于 用户代码。
但第二个 Cortex 软件 F
可用于进行 高级应用处理。
这些器件支持 各种工业标准
输入输出接口,例如 CAN、SPI、I2C、UART,
并且支持使用 CSI2 进行 高速原始 ADC 数据输出。
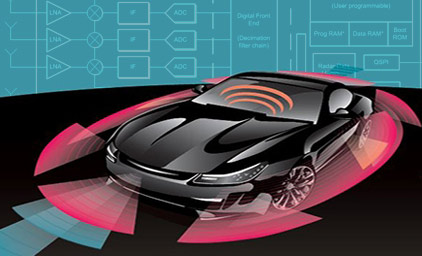
这个幻灯片显示了典型 FMCW 雷达链的组件,
并将它们映射到了 12、14 和 16x 器件的
信号处理功能。
接收器链始于 接收反射雷达
信号的 射频前端,
该反射雷达信号 与发射器信号混合,
生成拍频 信号并
传输到 ADC。
ADC 将模拟信号 转换为数字样本,
并对样本 进行预处理
以便进行数字处理。
对数字化样本进行 连续 FFT 运算
以进行距离、速度 和到达角计算。
可以使用 14xx 器件上的
板载雷达硬件加速器 来卸载 FFT 和检测处理,
从而获得 点云输出。
可以使用 16xx 器件, 利用板载的 C674x DSP
来运行高级群集、 跟踪和物体
分类算法。
此处,我们 显示了几种
可以在先进的汽车 应用中部署这些器件的
拓扑。
第一个应用显示了 四个 AWR1243 器件
采用级联配置 进行连接
以实现高分辨率成像。
1242 雷达 前端在器件
引脚边界处 提供高频率
时钟合成器输出,此输出可 以馈送给其他 AWR1242
器件以使它们 都同步运行
并充当单一传感器, 从而实现更高的角分辨率。
使用级联配置, 角分辨率
可以随着器件 数量的增加
而以指数方式提高, 因为角度单元总数
是实际发射和 接收通道总数的
乘积。
例如,具有三个发射 天线和四个接收
天线的单个 AWR1243 提供
四乘以三,即 12 个角度单元。
但以级联模式使用 两个 AWR1242 器件时,
角度单元数 增加到六乘以八,
即 48。
雷达传感器 通过 CSI2
连接到外部处理器, 该外部处理器
对来自传感器的原始 ADC 数据 进行 FMCW 信号处理。
该处理器还处理 雷达传感器的
配置和控制。
同样,可以对 中距离雷达或
角落雷达应用 使用包含两个
AWR1243 器件的 较小级联配置,
如第二幅图片中所示。
第三个应用 显示了单个 AWR1243
通过 CSI2 连接到 外部处理器
以实现远距离雷达。
此配置适用于 自动化公路驾驶
和自适应巡航 控制应用,
因此,应以能够实现 最大距离和速度的
方式配置传感器。
使用单元外 [听不清] 来实现更远的距离。
最后一幅图片显示了 一种卫星配置,
其中多个 1642 器件连接到了
一个外部应用处理器 RF-BGA 或 CAN-FD。
每个 1642 器件均使用 片上 C674x DSP
处理其雷达传感器数据, 并向外部处理器提供
点云输出。
可以使用 1642 上的 DSP 来运行高级群集
和跟踪算法, 并为外部
处理器提供 更智能的输入。
外部处理器 收集各自的输出
并做出适合应用的 更高级决策。
此配置可在 自动市区驾驶中
用于环境感应。
再来看看 下一部分,
我们将更详细地介绍 基于毫米波的传感器器件
以便了解 各个功能块。
这张图片显示了 AWR1x 器件系列的
复合方框图。
1243 雷达 前端只包括
射频/模拟子系统和 无线电子系统记录。
14 和 16x 器件 都包括主子系统,
而 DSP 子系统 仅存在于 16x 上。
器件架构 可以分为
以下主要块: 射频或模拟子系统、
雷达子系统和 主子系统。
除了这三个 系统外,
16xx 器件还包括 DSP 子系统,
在这张图片中 以蓝色标出。
让我们更细致地看一下 射频和模拟子系统。
这个子系统包括 射频和模拟电路,
即合成器、PA、LNA、 混频器、IF 和 ADC。
这个子系统还包括 晶体振荡器和
温度传感器。
射频和模拟 子系统可以
分为三个 子组件,
即时钟子系统、 发射子系统
和接收子系统。
我们将更详细地 介绍这些子组件,
首先从时钟 子系统开始。
时钟子系统 从 40 MHz 晶体的
输入基准生成 76 至 81 GHz 的频率。
它有一个内置的 振荡器电路,
其后面是一个清理 PLL 和一个射频合成器电路。
之后,4x 乘法器 将会处理射频
合成器的输出以便 在 76 至 81 GHz 频谱内
产生所需的频率。
射频合成器输出 由时序引擎块进行
调制以便产生 所需的波形,
确保传感器有效运行。
时序引擎 极其灵活,
可通过基于 R4F 的 无线电控制器子系统
进行编程。
可以在器件 引脚边界处
使用射频 合成器的
输出以实现多芯片 级联配置。
系统唤醒后,清理 PLL 也会为主机处理器提供
参考时钟。
时钟子系统也 具有用于检测
是否存在晶体 并监控发生器
时钟质量的 内置机制。
接下来我们讨论一下射频和 模拟子系统的组件,
即发射子系统。
根据器件不同, 发射子系统
包含两个或三个 并行发射链。
每个发射链都有 独立的相位
和振幅控制。
最多可以 同时运行
两个发射链。
但所有三个链 可以通过时间
多路复用方式一起运行。
该器件还支持 MIMO 雷达的
二进制相位调制和干扰抑制。
最后,我们看一下 接收子系统。
接收子系统包含 四个并行通道,
每个接收通道均包含 LNA、混频器、
IF 滤波、A2D 转换和抽取。
所有四个接收通道 可以同时运行。
还提供单独的 通电选项
以实现 系统优化。
与传统的仅卷带 接收器不同,
TI 的雷达传感器支持 复基带架构,
这种架构使用正交混频器 以及双通道 IF 和 ADC 链
为每个接收器通道 提供复数 I/Q
输出。
带通 IF 链 具有可配置的
较低截止频率, 约为 350 kHz。
连续时间 Σ-Δ ADC
支持高达 15 MHz 的带宽。
现在让我们看一看 下一个功能块,
即雷达子系统。
雷达处理器实际上 是以 200 MHz 的频率运行的
第二个专用 ARM Cortex-R4F 微控制器。
请注意,此处理器 由 TI 进行编程,
负责管理 校准不当、自检
和监控功能。
此处理器不适用于 客户应用。
在主子系统上 运行的用户应用
不能直接访问 雷达系统。
主系统通过 明确定义的
API 消息来访问 雷达子系统,
这些消息是通过 硬件邮箱发送的。
这个接口也称为 mmWaveLink。
TI 的毫米波 SDK 包括 mmWaveLink API。
下一个功能块 是主子系统。
主子系统包含一个 以 200 MHz 的频率
计时的 ARM Cortex-R4F 处理器, 用于运行用户应用代码。
在这个处理器上 执行的用户应用程序
控制器件的 总体运行,
包括通过明确 定义的 API 消息
进行雷达控制、在雷达硬件 加速器或 DSP 以及用于
外部接口的外设的 协助下进行
雷达信号处理。
这个子系统还包括 14 或 16xx 器件上
可用的各种 外部接口。
提供了一个四路串行 外设接口或 QSPI,
可用于直接从 串行闪存
下载客户代码。
包括一个 CAN 接口,
可用于直接从器件 与画布通信。
提供一个 SPI/I2C 接口, 用于进行电源管理 IC
或支付控制。
对于更复杂的 应用,器件
可以在外部 MCU 的 控制下运行,
该 MCU 可以通过 SPI 接口 与 14 或 16xx 器件通信。
下一个功能块 是 DSP 子系统。
DSP 子系统仅 存在于 16xx 器件上,
它包含 TI 的 高性能 C674x DSP,
用于进行 FMCW 信号处理, 包括 FFT 和检测,
还可用于高级 雷达信号处理。
这可以使 16xx 用作 完整的单芯片雷达,
并具有适用于群集、 跟踪和物体分类的
高级功能。
下面看一下雷达 硬件加速器,
这是本器件概述中的 最后一个功能块。
雷达硬件加速器 仅在 14xx 器件上
可用。
它可以从 主处理器上卸载
进行某些常用计算 和 FMCW 雷达信号
处理。
FMCW 雷达信号处理 涉及使用 FFT
和对数幅度 计算,从而
在距离、速度和角度 维度之间获得雷达
图像。
FMCW 雷达信号处理 中的一些常用功能
可以在雷达硬件 加速器内执行,
同时仍能保持 在主系统处理器中
实现其他专有 算法的灵活性。
如此图中 所示,加速器
包含两个功能部分。
第一个功能 部分用于 FFT
和相关预处理 以及对数幅度运算。
第二个 功能部分
提供基于 CFAR 或 恒虚警率的
检测算法。
进出雷达硬件 加速器的数据移动
基于 TI 的 EDMA 或 增强型直接存储器
存取控制器。
请参阅雷达 硬件加速器
用户指南或雷达硬件 加速器在线培训
以了解更多详细信息。
介绍完了各个 功能块后,
我们现在简要 看一下 TI 的
雷达器件上可用的启动模式。
TI 的毫米波雷达器件 支持两种启动模式,
即闪存模式 和功能模式。
通过按照 器件数据表中
所述的方式配置 加电感测或 SOP 引脚,
可以选择所需的 启动模式。
我们先谈一谈 闪存模式。
这种启动模式用于 将程序二进制映像
刻录或存储到 QSPI 串行闪存中。
启用这种启动模式后, 引导加载程序
将启用 UART 驱动程序
并会获得由应用二进制 映像构成的数据流。
在接收到有效的 应用二进制映像时,
引导加载程序会将该二进制 映像存储到串行闪存的
相应部分。
可以在软件开发过程中 使用这种启动模式
来升级闪存上的 应用二进制文件。
第二种模式是 功能或部署模式,
用于使用先前 存储的应用
二进制文件从 QSPI 闪存启动器件。
选择这种启动模式后, 引导加载程序
将会在 QSPI 闪存中查找 有效的应用程序映像。
在找到有效的映像后, 引导加载程序
会将该映像复制到 主子系统的存储器中
以开始启动过程。
通过这种方式, 器件将从闪存
自主启动。
在本次演示的 最后一部分,
我们快速了解一下 可用于对 TI 的
毫米波雷达器件进行 编程的软件平台。
TI 的毫米波雷达传感器 有丰富的软件产品作为辅助,
其中包括 SDK、 TI 设计、示例
和工具。
软件平台分为 三个主要组成部分,
如图所示。
第一部分是 毫米波 SDK,
它提供各种 基础软件组件,
例如 TI 的 SYS/BIOS RTOS 和
与雷达器件上 提供的硬件外设
相对应的驱动程序。
它还包括 mmWaveLink 和
毫米波 API 以支持 使用高级 API
对雷达传感器进行编程。
它还包括适用于 C67x DSP 和
雷达硬件加速器的 信号处理库。
除了毫米波 SDK 外, 软件产品还包括
开包即用演示、 各种 TI 设计
和实验。
通过开包即用演示, 用户可以
快速评估 雷达 EVM
并可视化 目标物体的
距离、速度和角度。
TI 设计演示 TI 毫米波雷达
在特定应用中的 适用性,
例如液位感应和 交通监控应用。
最后,但同样重要的是, 我们有 mmWave Studio,
它提供了系统估算器工具 和原始 ADC 数据
捕获功能。
我们将在下一张 幻灯片中介绍
系统估算器工具。
定义线性调频脉冲配置 对 FMCW 雷达的正常运行
非常重要。
系统估算器 工具的目的
是简化为 TI 的 毫米波雷达
传感器定义 线性调频脉冲
以实现所需感应配置 这项复杂任务。
使用这个工具, 用户可以提供
应用级输入, 例如所需的最大距离、
速度、距离分辨率、 速度分辨率等,
并且输出线性 调频脉冲配置,
此配置可与毫米波 API 配合使用,
以便相应地对 传感器进行编程。
它还估算与线性调频 脉冲配置相对应的
雷达数据队列 存储器要求,
并还标记 越界参数。
这张图片显示了 TI 毫米波 SDK 的
架构图。
用蓝色标示的 组件由 SDK 提供,
而用红色标示的组件 表示应用代码。
我们可以看到, SDK 采用模块化设计,
并且分为 不同的层。
每个层为其 上面的层提供
明确定义的 API, 因而降低了复杂性。
例如毫米波 前端固件,
它在雷达 子系统上
运行,完全包含 射频和模拟
功能的配置、 控制、校准和
监控。
它导出 mmWaveLink API,使用此 API,
主子系统可与其 通信,从而控制和
监视传感器前端。
毫米波 SDK 不仅 实现 mmWaveLink 的
应用侧, 而且还提供
毫米波 API 的 另一个级别的抽象。
该 API 提供高级 功能,用于
对雷达前端进行编程和控制。
毫米波 API 在内部 使用 mmWaveLink API。
这张图片显示了 毫米波 SDK 的目录结构。
TI 汽车毫米波雷达 传感器概述至此
结束。
要了解有关这些 器件的更多信息,
请参阅这些资源。
谢谢。
大家好,欢迎 观看 TI 的 AWR1x 系列基于 CMOS 的 单芯片毫米波雷达传感器的 器件概述。 在此视频中,我们将 首先扼要介绍 TI 的 毫米波传感器, 了解信号处理链 与这些器件的 关系,并介绍 几种可以在其中部署 这些器件的系统拓扑。 然后,我们详细 介绍这些器件, 其中会涉及主要 功能块。 最后,我们将了解 启动模式并简要概述 可使用 TI 的 毫米波传感器 进行开发的 软件开发平台。 让我们首先简要 概述一下这些器件。 AWR1243、1443 和 1642 属于 AWR1x 系列单芯片 毫米波雷达 传感器,适用于先进的 驾驶员辅助系统 或 ADAS 应用。 这些器件 能够在 76 至 81 GHz 频段内运行,具有高达 4 GHz 的连续线性调频脉冲带宽。 这些器件是采用 TI 的 低功耗 45 纳米射频 CMOS 技术构建的, 并可在极小的 封装中实现 前所未有的集成度。 这些雷达传感器 为先进的汽车应用 提供了适用于 低功耗和 自监控超精确雷达 系统的理想 解决方案,例如 自适应巡航 控制、自动紧急 刹车、盲点检测、 行人或骑行者 保护、防碰撞、 市区驾驶和 自动化公路驾驶, 仅以这些为例。 通过集成模拟 和数字组件, 包括多个发射 和接收链、 PLL、A2D 转换器、 ARM Cortex-R4F MCU 或 C674x DSP 或 FFT 加速器、 存储器和各种 I/O 接口, 此器件系统可以从 AWR1243 雷达前端一起扩展到 完整的单芯片雷达。 这些器件还将 射频的连续自监控 和校准特性 以及模拟功能 集成到了专用的、 基于内置 ARM R4F 的 无线电过程子系统中, 负责进行 前端的配置、 控制和校准。 此部分介绍了 这些器件的主要特性。 这些传感器基于 FMCW 雷达技术, 能够在 76 至 81 GHz 的 频率范围内运行, 并且支持高达 4 GHz 的 线性调频脉冲带宽。 为 MIMO 雷达的 运行提供了 多达三个发射链 和四个接收链。 TI 的毫米波 传感器支持 高度可编程且灵活的 线性调频脉冲剖面, 以便在同一个雷达 帧中支持多个感应 剖面。 1443 具有用于 FFT 运算的 板载硬件加速器 和基于连续虚警率 或 CFAR 的检测 算法,而 1642 为 FMCW 信号处理 提供功能全面的 C76X 高性能 DSP 内核以及 群集、跟踪和 物体分类等 高级算法。 有两个 ARM Cortex 软件 FMCU 以 200 MHz 的频率运行。 其中一个已锁定, 供校准和监控 引擎,即无线电 子系统使用。 这个 R4F 通过 TI 提供的固件进行编程, 不适用于 用户代码。 但第二个 Cortex 软件 F 可用于进行 高级应用处理。 这些器件支持 各种工业标准 输入输出接口,例如 CAN、SPI、I2C、UART, 并且支持使用 CSI2 进行 高速原始 ADC 数据输出。 这个幻灯片显示了典型 FMCW 雷达链的组件, 并将它们映射到了 12、14 和 16x 器件的 信号处理功能。 接收器链始于 接收反射雷达 信号的 射频前端, 该反射雷达信号 与发射器信号混合, 生成拍频 信号并 传输到 ADC。 ADC 将模拟信号 转换为数字样本, 并对样本 进行预处理 以便进行数字处理。 对数字化样本进行 连续 FFT 运算 以进行距离、速度 和到达角计算。 可以使用 14xx 器件上的 板载雷达硬件加速器 来卸载 FFT 和检测处理, 从而获得 点云输出。 可以使用 16xx 器件, 利用板载的 C674x DSP 来运行高级群集、 跟踪和物体 分类算法。 此处,我们 显示了几种 可以在先进的汽车 应用中部署这些器件的 拓扑。 第一个应用显示了 四个 AWR1243 器件 采用级联配置 进行连接 以实现高分辨率成像。 1242 雷达 前端在器件 引脚边界处 提供高频率 时钟合成器输出,此输出可 以馈送给其他 AWR1242 器件以使它们 都同步运行 并充当单一传感器, 从而实现更高的角分辨率。 使用级联配置, 角分辨率 可以随着器件 数量的增加 而以指数方式提高, 因为角度单元总数 是实际发射和 接收通道总数的 乘积。 例如,具有三个发射 天线和四个接收 天线的单个 AWR1243 提供 四乘以三,即 12 个角度单元。 但以级联模式使用 两个 AWR1242 器件时, 角度单元数 增加到六乘以八, 即 48。 雷达传感器 通过 CSI2 连接到外部处理器, 该外部处理器 对来自传感器的原始 ADC 数据 进行 FMCW 信号处理。 该处理器还处理 雷达传感器的 配置和控制。 同样,可以对 中距离雷达或 角落雷达应用 使用包含两个 AWR1243 器件的 较小级联配置, 如第二幅图片中所示。 第三个应用 显示了单个 AWR1243 通过 CSI2 连接到 外部处理器 以实现远距离雷达。 此配置适用于 自动化公路驾驶 和自适应巡航 控制应用, 因此,应以能够实现 最大距离和速度的 方式配置传感器。 使用单元外 [听不清] 来实现更远的距离。 最后一幅图片显示了 一种卫星配置, 其中多个 1642 器件连接到了 一个外部应用处理器 RF-BGA 或 CAN-FD。 每个 1642 器件均使用 片上 C674x DSP 处理其雷达传感器数据, 并向外部处理器提供 点云输出。 可以使用 1642 上的 DSP 来运行高级群集 和跟踪算法, 并为外部 处理器提供 更智能的输入。 外部处理器 收集各自的输出 并做出适合应用的 更高级决策。 此配置可在 自动市区驾驶中 用于环境感应。 再来看看 下一部分, 我们将更详细地介绍 基于毫米波的传感器器件 以便了解 各个功能块。 这张图片显示了 AWR1x 器件系列的 复合方框图。 1243 雷达 前端只包括 射频/模拟子系统和 无线电子系统记录。 14 和 16x 器件 都包括主子系统, 而 DSP 子系统 仅存在于 16x 上。 器件架构 可以分为 以下主要块: 射频或模拟子系统、 雷达子系统和 主子系统。 除了这三个 系统外, 16xx 器件还包括 DSP 子系统, 在这张图片中 以蓝色标出。 让我们更细致地看一下 射频和模拟子系统。 这个子系统包括 射频和模拟电路, 即合成器、PA、LNA、 混频器、IF 和 ADC。 这个子系统还包括 晶体振荡器和 温度传感器。 射频和模拟 子系统可以 分为三个 子组件, 即时钟子系统、 发射子系统 和接收子系统。 我们将更详细地 介绍这些子组件, 首先从时钟 子系统开始。 时钟子系统 从 40 MHz 晶体的 输入基准生成 76 至 81 GHz 的频率。 它有一个内置的 振荡器电路, 其后面是一个清理 PLL 和一个射频合成器电路。 之后,4x 乘法器 将会处理射频 合成器的输出以便 在 76 至 81 GHz 频谱内 产生所需的频率。 射频合成器输出 由时序引擎块进行 调制以便产生 所需的波形, 确保传感器有效运行。 时序引擎 极其灵活, 可通过基于 R4F 的 无线电控制器子系统 进行编程。 可以在器件 引脚边界处 使用射频 合成器的 输出以实现多芯片 级联配置。 系统唤醒后,清理 PLL 也会为主机处理器提供 参考时钟。 时钟子系统也 具有用于检测 是否存在晶体 并监控发生器 时钟质量的 内置机制。 接下来我们讨论一下射频和 模拟子系统的组件, 即发射子系统。 根据器件不同, 发射子系统 包含两个或三个 并行发射链。 每个发射链都有 独立的相位 和振幅控制。 最多可以 同时运行 两个发射链。 但所有三个链 可以通过时间 多路复用方式一起运行。 该器件还支持 MIMO 雷达的 二进制相位调制和干扰抑制。 最后,我们看一下 接收子系统。 接收子系统包含 四个并行通道, 每个接收通道均包含 LNA、混频器、 IF 滤波、A2D 转换和抽取。 所有四个接收通道 可以同时运行。 还提供单独的 通电选项 以实现 系统优化。 与传统的仅卷带 接收器不同, TI 的雷达传感器支持 复基带架构, 这种架构使用正交混频器 以及双通道 IF 和 ADC 链 为每个接收器通道 提供复数 I/Q 输出。 带通 IF 链 具有可配置的 较低截止频率, 约为 350 kHz。 连续时间 Σ-Δ ADC 支持高达 15 MHz 的带宽。 现在让我们看一看 下一个功能块, 即雷达子系统。 雷达处理器实际上 是以 200 MHz 的频率运行的 第二个专用 ARM Cortex-R4F 微控制器。 请注意,此处理器 由 TI 进行编程, 负责管理 校准不当、自检 和监控功能。 此处理器不适用于 客户应用。 在主子系统上 运行的用户应用 不能直接访问 雷达系统。 主系统通过 明确定义的 API 消息来访问 雷达子系统, 这些消息是通过 硬件邮箱发送的。 这个接口也称为 mmWaveLink。 TI 的毫米波 SDK 包括 mmWaveLink API。 下一个功能块 是主子系统。 主子系统包含一个 以 200 MHz 的频率 计时的 ARM Cortex-R4F 处理器, 用于运行用户应用代码。 在这个处理器上 执行的用户应用程序 控制器件的 总体运行, 包括通过明确 定义的 API 消息 进行雷达控制、在雷达硬件 加速器或 DSP 以及用于 外部接口的外设的 协助下进行 雷达信号处理。 这个子系统还包括 14 或 16xx 器件上 可用的各种 外部接口。 提供了一个四路串行 外设接口或 QSPI, 可用于直接从 串行闪存 下载客户代码。 包括一个 CAN 接口, 可用于直接从器件 与画布通信。 提供一个 SPI/I2C 接口, 用于进行电源管理 IC 或支付控制。 对于更复杂的 应用,器件 可以在外部 MCU 的 控制下运行, 该 MCU 可以通过 SPI 接口 与 14 或 16xx 器件通信。 下一个功能块 是 DSP 子系统。 DSP 子系统仅 存在于 16xx 器件上, 它包含 TI 的 高性能 C674x DSP, 用于进行 FMCW 信号处理, 包括 FFT 和检测, 还可用于高级 雷达信号处理。 这可以使 16xx 用作 完整的单芯片雷达, 并具有适用于群集、 跟踪和物体分类的 高级功能。 下面看一下雷达 硬件加速器, 这是本器件概述中的 最后一个功能块。 雷达硬件加速器 仅在 14xx 器件上 可用。 它可以从 主处理器上卸载 进行某些常用计算 和 FMCW 雷达信号 处理。 FMCW 雷达信号处理 涉及使用 FFT 和对数幅度 计算,从而 在距离、速度和角度 维度之间获得雷达 图像。 FMCW 雷达信号处理 中的一些常用功能 可以在雷达硬件 加速器内执行, 同时仍能保持 在主系统处理器中 实现其他专有 算法的灵活性。 如此图中 所示,加速器 包含两个功能部分。 第一个功能 部分用于 FFT 和相关预处理 以及对数幅度运算。 第二个 功能部分 提供基于 CFAR 或 恒虚警率的 检测算法。 进出雷达硬件 加速器的数据移动 基于 TI 的 EDMA 或 增强型直接存储器 存取控制器。 请参阅雷达 硬件加速器 用户指南或雷达硬件 加速器在线培训 以了解更多详细信息。 介绍完了各个 功能块后, 我们现在简要 看一下 TI 的 雷达器件上可用的启动模式。 TI 的毫米波雷达器件 支持两种启动模式, 即闪存模式 和功能模式。 通过按照 器件数据表中 所述的方式配置 加电感测或 SOP 引脚, 可以选择所需的 启动模式。 我们先谈一谈 闪存模式。 这种启动模式用于 将程序二进制映像 刻录或存储到 QSPI 串行闪存中。 启用这种启动模式后, 引导加载程序 将启用 UART 驱动程序 并会获得由应用二进制 映像构成的数据流。 在接收到有效的 应用二进制映像时, 引导加载程序会将该二进制 映像存储到串行闪存的 相应部分。 可以在软件开发过程中 使用这种启动模式 来升级闪存上的 应用二进制文件。 第二种模式是 功能或部署模式, 用于使用先前 存储的应用 二进制文件从 QSPI 闪存启动器件。 选择这种启动模式后, 引导加载程序 将会在 QSPI 闪存中查找 有效的应用程序映像。 在找到有效的映像后, 引导加载程序 会将该映像复制到 主子系统的存储器中 以开始启动过程。 通过这种方式, 器件将从闪存 自主启动。 在本次演示的 最后一部分, 我们快速了解一下 可用于对 TI 的 毫米波雷达器件进行 编程的软件平台。 TI 的毫米波雷达传感器 有丰富的软件产品作为辅助, 其中包括 SDK、 TI 设计、示例 和工具。 软件平台分为 三个主要组成部分, 如图所示。 第一部分是 毫米波 SDK, 它提供各种 基础软件组件, 例如 TI 的 SYS/BIOS RTOS 和 与雷达器件上 提供的硬件外设 相对应的驱动程序。 它还包括 mmWaveLink 和 毫米波 API 以支持 使用高级 API 对雷达传感器进行编程。 它还包括适用于 C67x DSP 和 雷达硬件加速器的 信号处理库。 除了毫米波 SDK 外, 软件产品还包括 开包即用演示、 各种 TI 设计 和实验。 通过开包即用演示, 用户可以 快速评估 雷达 EVM 并可视化 目标物体的 距离、速度和角度。 TI 设计演示 TI 毫米波雷达 在特定应用中的 适用性, 例如液位感应和 交通监控应用。 最后,但同样重要的是, 我们有 mmWave Studio, 它提供了系统估算器工具 和原始 ADC 数据 捕获功能。 我们将在下一张 幻灯片中介绍 系统估算器工具。 定义线性调频脉冲配置 对 FMCW 雷达的正常运行 非常重要。 系统估算器 工具的目的 是简化为 TI 的 毫米波雷达 传感器定义 线性调频脉冲 以实现所需感应配置 这项复杂任务。 使用这个工具, 用户可以提供 应用级输入, 例如所需的最大距离、 速度、距离分辨率、 速度分辨率等, 并且输出线性 调频脉冲配置, 此配置可与毫米波 API 配合使用, 以便相应地对 传感器进行编程。 它还估算与线性调频 脉冲配置相对应的 雷达数据队列 存储器要求, 并还标记 越界参数。 这张图片显示了 TI 毫米波 SDK 的 架构图。 用蓝色标示的 组件由 SDK 提供, 而用红色标示的组件 表示应用代码。 我们可以看到, SDK 采用模块化设计, 并且分为 不同的层。 每个层为其 上面的层提供 明确定义的 API, 因而降低了复杂性。 例如毫米波 前端固件, 它在雷达 子系统上 运行,完全包含 射频和模拟 功能的配置、 控制、校准和 监控。 它导出 mmWaveLink API,使用此 API, 主子系统可与其 通信,从而控制和 监视传感器前端。 毫米波 SDK 不仅 实现 mmWaveLink 的 应用侧, 而且还提供 毫米波 API 的 另一个级别的抽象。 该 API 提供高级 功能,用于 对雷达前端进行编程和控制。 毫米波 API 在内部 使用 mmWaveLink API。 这张图片显示了 毫米波 SDK 的目录结构。 TI 汽车毫米波雷达 传感器概述至此 结束。 要了解有关这些 器件的更多信息, 请参阅这些资源。 谢谢。
大家好,欢迎 观看 TI 的
AWR1x 系列基于 CMOS 的 单芯片毫米波雷达传感器的
器件概述。
在此视频中,我们将 首先扼要介绍 TI 的
毫米波传感器, 了解信号处理链
与这些器件的 关系,并介绍
几种可以在其中部署 这些器件的系统拓扑。
然后,我们详细 介绍这些器件,
其中会涉及主要 功能块。
最后,我们将了解 启动模式并简要概述
可使用 TI 的 毫米波传感器
进行开发的 软件开发平台。
让我们首先简要 概述一下这些器件。
AWR1243、1443 和 1642 属于
AWR1x 系列单芯片 毫米波雷达
传感器,适用于先进的 驾驶员辅助系统
或 ADAS 应用。
这些器件 能够在 76
至 81 GHz 频段内运行,具有高达 4 GHz 的连续线性调频脉冲带宽。
这些器件是采用 TI 的 低功耗 45 纳米射频
CMOS 技术构建的, 并可在极小的
封装中实现 前所未有的集成度。
这些雷达传感器 为先进的汽车应用
提供了适用于 低功耗和
自监控超精确雷达 系统的理想
解决方案,例如 自适应巡航
控制、自动紧急 刹车、盲点检测、
行人或骑行者 保护、防碰撞、
市区驾驶和 自动化公路驾驶,
仅以这些为例。
通过集成模拟 和数字组件,
包括多个发射 和接收链、
PLL、A2D 转换器、 ARM Cortex-R4F MCU
或 C674x DSP 或 FFT 加速器、
存储器和各种 I/O 接口, 此器件系统可以从 AWR1243
雷达前端一起扩展到 完整的单芯片雷达。
这些器件还将 射频的连续自监控
和校准特性 以及模拟功能
集成到了专用的、 基于内置 ARM R4F 的
无线电过程子系统中, 负责进行
前端的配置、 控制和校准。
此部分介绍了 这些器件的主要特性。
这些传感器基于 FMCW 雷达技术,
能够在 76 至 81 GHz 的 频率范围内运行,
并且支持高达 4 GHz 的 线性调频脉冲带宽。
为 MIMO 雷达的 运行提供了
多达三个发射链 和四个接收链。
TI 的毫米波 传感器支持
高度可编程且灵活的 线性调频脉冲剖面,
以便在同一个雷达 帧中支持多个感应
剖面。
1443 具有用于 FFT 运算的 板载硬件加速器
和基于连续虚警率 或 CFAR 的检测
算法,而 1642 为
FMCW 信号处理 提供功能全面的
C76X 高性能 DSP 内核以及
群集、跟踪和 物体分类等
高级算法。
有两个 ARM Cortex 软件
FMCU 以 200 MHz 的频率运行。
其中一个已锁定, 供校准和监控
引擎,即无线电 子系统使用。
这个 R4F 通过 TI 提供的固件进行编程,
不适用于 用户代码。
但第二个 Cortex 软件 F
可用于进行 高级应用处理。
这些器件支持 各种工业标准
输入输出接口,例如 CAN、SPI、I2C、UART,
并且支持使用 CSI2 进行 高速原始 ADC 数据输出。
这个幻灯片显示了典型 FMCW 雷达链的组件,
并将它们映射到了 12、14 和 16x 器件的
信号处理功能。
接收器链始于 接收反射雷达
信号的 射频前端,
该反射雷达信号 与发射器信号混合,
生成拍频 信号并
传输到 ADC。
ADC 将模拟信号 转换为数字样本,
并对样本 进行预处理
以便进行数字处理。
对数字化样本进行 连续 FFT 运算
以进行距离、速度 和到达角计算。
可以使用 14xx 器件上的
板载雷达硬件加速器 来卸载 FFT 和检测处理,
从而获得 点云输出。
可以使用 16xx 器件, 利用板载的 C674x DSP
来运行高级群集、 跟踪和物体
分类算法。
此处,我们 显示了几种
可以在先进的汽车 应用中部署这些器件的
拓扑。
第一个应用显示了 四个 AWR1243 器件
采用级联配置 进行连接
以实现高分辨率成像。
1242 雷达 前端在器件
引脚边界处 提供高频率
时钟合成器输出,此输出可 以馈送给其他 AWR1242
器件以使它们 都同步运行
并充当单一传感器, 从而实现更高的角分辨率。
使用级联配置, 角分辨率
可以随着器件 数量的增加
而以指数方式提高, 因为角度单元总数
是实际发射和 接收通道总数的
乘积。
例如,具有三个发射 天线和四个接收
天线的单个 AWR1243 提供
四乘以三,即 12 个角度单元。
但以级联模式使用 两个 AWR1242 器件时,
角度单元数 增加到六乘以八,
即 48。
雷达传感器 通过 CSI2
连接到外部处理器, 该外部处理器
对来自传感器的原始 ADC 数据 进行 FMCW 信号处理。
该处理器还处理 雷达传感器的
配置和控制。
同样,可以对 中距离雷达或
角落雷达应用 使用包含两个
AWR1243 器件的 较小级联配置,
如第二幅图片中所示。
第三个应用 显示了单个 AWR1243
通过 CSI2 连接到 外部处理器
以实现远距离雷达。
此配置适用于 自动化公路驾驶
和自适应巡航 控制应用,
因此,应以能够实现 最大距离和速度的
方式配置传感器。
使用单元外 [听不清] 来实现更远的距离。
最后一幅图片显示了 一种卫星配置,
其中多个 1642 器件连接到了
一个外部应用处理器 RF-BGA 或 CAN-FD。
每个 1642 器件均使用 片上 C674x DSP
处理其雷达传感器数据, 并向外部处理器提供
点云输出。
可以使用 1642 上的 DSP 来运行高级群集
和跟踪算法, 并为外部
处理器提供 更智能的输入。
外部处理器 收集各自的输出
并做出适合应用的 更高级决策。
此配置可在 自动市区驾驶中
用于环境感应。
再来看看 下一部分,
我们将更详细地介绍 基于毫米波的传感器器件
以便了解 各个功能块。
这张图片显示了 AWR1x 器件系列的
复合方框图。
1243 雷达 前端只包括
射频/模拟子系统和 无线电子系统记录。
14 和 16x 器件 都包括主子系统,
而 DSP 子系统 仅存在于 16x 上。
器件架构 可以分为
以下主要块: 射频或模拟子系统、
雷达子系统和 主子系统。
除了这三个 系统外,
16xx 器件还包括 DSP 子系统,
在这张图片中 以蓝色标出。
让我们更细致地看一下 射频和模拟子系统。
这个子系统包括 射频和模拟电路,
即合成器、PA、LNA、 混频器、IF 和 ADC。
这个子系统还包括 晶体振荡器和
温度传感器。
射频和模拟 子系统可以
分为三个 子组件,
即时钟子系统、 发射子系统
和接收子系统。
我们将更详细地 介绍这些子组件,
首先从时钟 子系统开始。
时钟子系统 从 40 MHz 晶体的
输入基准生成 76 至 81 GHz 的频率。
它有一个内置的 振荡器电路,
其后面是一个清理 PLL 和一个射频合成器电路。
之后,4x 乘法器 将会处理射频
合成器的输出以便 在 76 至 81 GHz 频谱内
产生所需的频率。
射频合成器输出 由时序引擎块进行
调制以便产生 所需的波形,
确保传感器有效运行。
时序引擎 极其灵活,
可通过基于 R4F 的 无线电控制器子系统
进行编程。
可以在器件 引脚边界处
使用射频 合成器的
输出以实现多芯片 级联配置。
系统唤醒后,清理 PLL 也会为主机处理器提供
参考时钟。
时钟子系统也 具有用于检测
是否存在晶体 并监控发生器
时钟质量的 内置机制。
接下来我们讨论一下射频和 模拟子系统的组件,
即发射子系统。
根据器件不同, 发射子系统
包含两个或三个 并行发射链。
每个发射链都有 独立的相位
和振幅控制。
最多可以 同时运行
两个发射链。
但所有三个链 可以通过时间
多路复用方式一起运行。
该器件还支持 MIMO 雷达的
二进制相位调制和干扰抑制。
最后,我们看一下 接收子系统。
接收子系统包含 四个并行通道,
每个接收通道均包含 LNA、混频器、
IF 滤波、A2D 转换和抽取。
所有四个接收通道 可以同时运行。
还提供单独的 通电选项
以实现 系统优化。
与传统的仅卷带 接收器不同,
TI 的雷达传感器支持 复基带架构,
这种架构使用正交混频器 以及双通道 IF 和 ADC 链
为每个接收器通道 提供复数 I/Q
输出。
带通 IF 链 具有可配置的
较低截止频率, 约为 350 kHz。
连续时间 Σ-Δ ADC
支持高达 15 MHz 的带宽。
现在让我们看一看 下一个功能块,
即雷达子系统。
雷达处理器实际上 是以 200 MHz 的频率运行的
第二个专用 ARM Cortex-R4F 微控制器。
请注意,此处理器 由 TI 进行编程,
负责管理 校准不当、自检
和监控功能。
此处理器不适用于 客户应用。
在主子系统上 运行的用户应用
不能直接访问 雷达系统。
主系统通过 明确定义的
API 消息来访问 雷达子系统,
这些消息是通过 硬件邮箱发送的。
这个接口也称为 mmWaveLink。
TI 的毫米波 SDK 包括 mmWaveLink API。
下一个功能块 是主子系统。
主子系统包含一个 以 200 MHz 的频率
计时的 ARM Cortex-R4F 处理器, 用于运行用户应用代码。
在这个处理器上 执行的用户应用程序
控制器件的 总体运行,
包括通过明确 定义的 API 消息
进行雷达控制、在雷达硬件 加速器或 DSP 以及用于
外部接口的外设的 协助下进行
雷达信号处理。
这个子系统还包括 14 或 16xx 器件上
可用的各种 外部接口。
提供了一个四路串行 外设接口或 QSPI,
可用于直接从 串行闪存
下载客户代码。
包括一个 CAN 接口,
可用于直接从器件 与画布通信。
提供一个 SPI/I2C 接口, 用于进行电源管理 IC
或支付控制。
对于更复杂的 应用,器件
可以在外部 MCU 的 控制下运行,
该 MCU 可以通过 SPI 接口 与 14 或 16xx 器件通信。
下一个功能块 是 DSP 子系统。
DSP 子系统仅 存在于 16xx 器件上,
它包含 TI 的 高性能 C674x DSP,
用于进行 FMCW 信号处理, 包括 FFT 和检测,
还可用于高级 雷达信号处理。
这可以使 16xx 用作 完整的单芯片雷达,
并具有适用于群集、 跟踪和物体分类的
高级功能。
下面看一下雷达 硬件加速器,
这是本器件概述中的 最后一个功能块。
雷达硬件加速器 仅在 14xx 器件上
可用。
它可以从 主处理器上卸载
进行某些常用计算 和 FMCW 雷达信号
处理。
FMCW 雷达信号处理 涉及使用 FFT
和对数幅度 计算,从而
在距离、速度和角度 维度之间获得雷达
图像。
FMCW 雷达信号处理 中的一些常用功能
可以在雷达硬件 加速器内执行,
同时仍能保持 在主系统处理器中
实现其他专有 算法的灵活性。
如此图中 所示,加速器
包含两个功能部分。
第一个功能 部分用于 FFT
和相关预处理 以及对数幅度运算。
第二个 功能部分
提供基于 CFAR 或 恒虚警率的
检测算法。
进出雷达硬件 加速器的数据移动
基于 TI 的 EDMA 或 增强型直接存储器
存取控制器。
请参阅雷达 硬件加速器
用户指南或雷达硬件 加速器在线培训
以了解更多详细信息。
介绍完了各个 功能块后,
我们现在简要 看一下 TI 的
雷达器件上可用的启动模式。
TI 的毫米波雷达器件 支持两种启动模式,
即闪存模式 和功能模式。
通过按照 器件数据表中
所述的方式配置 加电感测或 SOP 引脚,
可以选择所需的 启动模式。
我们先谈一谈 闪存模式。
这种启动模式用于 将程序二进制映像
刻录或存储到 QSPI 串行闪存中。
启用这种启动模式后, 引导加载程序
将启用 UART 驱动程序
并会获得由应用二进制 映像构成的数据流。
在接收到有效的 应用二进制映像时,
引导加载程序会将该二进制 映像存储到串行闪存的
相应部分。
可以在软件开发过程中 使用这种启动模式
来升级闪存上的 应用二进制文件。
第二种模式是 功能或部署模式,
用于使用先前 存储的应用
二进制文件从 QSPI 闪存启动器件。
选择这种启动模式后, 引导加载程序
将会在 QSPI 闪存中查找 有效的应用程序映像。
在找到有效的映像后, 引导加载程序
会将该映像复制到 主子系统的存储器中
以开始启动过程。
通过这种方式, 器件将从闪存
自主启动。
在本次演示的 最后一部分,
我们快速了解一下 可用于对 TI 的
毫米波雷达器件进行 编程的软件平台。
TI 的毫米波雷达传感器 有丰富的软件产品作为辅助,
其中包括 SDK、 TI 设计、示例
和工具。
软件平台分为 三个主要组成部分,
如图所示。
第一部分是 毫米波 SDK,
它提供各种 基础软件组件,
例如 TI 的 SYS/BIOS RTOS 和
与雷达器件上 提供的硬件外设
相对应的驱动程序。
它还包括 mmWaveLink 和
毫米波 API 以支持 使用高级 API
对雷达传感器进行编程。
它还包括适用于 C67x DSP 和
雷达硬件加速器的 信号处理库。
除了毫米波 SDK 外, 软件产品还包括
开包即用演示、 各种 TI 设计
和实验。
通过开包即用演示, 用户可以
快速评估 雷达 EVM
并可视化 目标物体的
距离、速度和角度。
TI 设计演示 TI 毫米波雷达
在特定应用中的 适用性,
例如液位感应和 交通监控应用。
最后,但同样重要的是, 我们有 mmWave Studio,
它提供了系统估算器工具 和原始 ADC 数据
捕获功能。
我们将在下一张 幻灯片中介绍
系统估算器工具。
定义线性调频脉冲配置 对 FMCW 雷达的正常运行
非常重要。
系统估算器 工具的目的
是简化为 TI 的 毫米波雷达
传感器定义 线性调频脉冲
以实现所需感应配置 这项复杂任务。
使用这个工具, 用户可以提供
应用级输入, 例如所需的最大距离、
速度、距离分辨率、 速度分辨率等,
并且输出线性 调频脉冲配置,
此配置可与毫米波 API 配合使用,
以便相应地对 传感器进行编程。
它还估算与线性调频 脉冲配置相对应的
雷达数据队列 存储器要求,
并还标记 越界参数。
这张图片显示了 TI 毫米波 SDK 的
架构图。
用蓝色标示的 组件由 SDK 提供,
而用红色标示的组件 表示应用代码。
我们可以看到, SDK 采用模块化设计,
并且分为 不同的层。
每个层为其 上面的层提供
明确定义的 API, 因而降低了复杂性。
例如毫米波 前端固件,
它在雷达 子系统上
运行,完全包含 射频和模拟
功能的配置、 控制、校准和
监控。
它导出 mmWaveLink API,使用此 API,
主子系统可与其 通信,从而控制和
监视传感器前端。
毫米波 SDK 不仅 实现 mmWaveLink 的
应用侧, 而且还提供
毫米波 API 的 另一个级别的抽象。
该 API 提供高级 功能,用于
对雷达前端进行编程和控制。
毫米波 API 在内部 使用 mmWaveLink API。
这张图片显示了 毫米波 SDK 的目录结构。
TI 汽车毫米波雷达 传感器概述至此
结束。
要了解有关这些 器件的更多信息,
请参阅这些资源。
谢谢。
手机看
扫码用手机观看
 视频简介
视频简介
2.1 TI汽车mmWave传感器设备概述
所属课程:mmWave系列培训
发布时间:2017.08.11
视频集数:28
本节视频时长:00:20:40
TI mmWave传感器设备培训 - 描述了TI mmWave传感器以及如何使用它们。



 未学习 1.1 毫米波传感介绍:FMCW雷达 - 模块1:范围估计
未学习 1.1 毫米波传感介绍:FMCW雷达 - 模块1:范围估计
 未学习 1.2 毫米波传感介绍:FMCW雷达 - 模块2:IF信号的相位
未学习 1.2 毫米波传感介绍:FMCW雷达 - 模块2:IF信号的相位
 未学习 1.3 毫米波传感介绍:FMCW雷达 - 模块3:速度估计
未学习 1.3 毫米波传感介绍:FMCW雷达 - 模块3:速度估计
 未学习 1.4 毫米波传感介绍:FMCW雷达 - 模块4:一些系统设计讨论
未学习 1.4 毫米波传感介绍:FMCW雷达 - 模块4:一些系统设计讨论
 未学习 1.5 毫米波传感介绍:FMCW雷达 - 模块5:角度估计
未学习 1.5 毫米波传感介绍:FMCW雷达 - 模块5:角度估计
 未学习 2.1 TI汽车mmWave传感器设备概述
未学习 2.1 TI汽车mmWave传感器设备概述
 未学习 2.2 TI工业mmWave传感器器件概述
未学习 2.2 TI工业mmWave传感器器件概述
 未学习 2.3 mmWave SDK简介
未学习 2.3 mmWave SDK简介
 未学习 2.4 mmWave雷达编程模型
未学习 2.4 mmWave雷达编程模型
 未学习 2.5 mmWave EVMs深入学习
未学习 2.5 mmWave EVMs深入学习
 未学习 2.6 mmWave波形传感器简介1443硬件加速器
未学习 2.6 mmWave波形传感器简介1443硬件加速器
 未学习 3.1 mmWave SDK EVM开箱即用演示
未学习 3.1 mmWave SDK EVM开箱即用演示
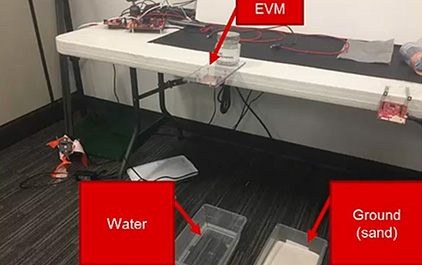
 未学习 3.2 mmWave水VS地面分类实验
未学习 3.2 mmWave水VS地面分类实验
 未学习 3.3 mmWave生命体征实验
未学习 3.3 mmWave生命体征实验
 未学习 (中文)机器人如何利用mmWave实现“传感和避障”
未学习 (中文)机器人如何利用mmWave实现“传感和避障”
 未学习 (中文)mmWave与机器人:深度技术探究
未学习 (中文)mmWave与机器人:深度技术探究
 未学习 (中文)DCA1000 培训视频
未学习 (中文)DCA1000 培训视频

















